8. Servomotores
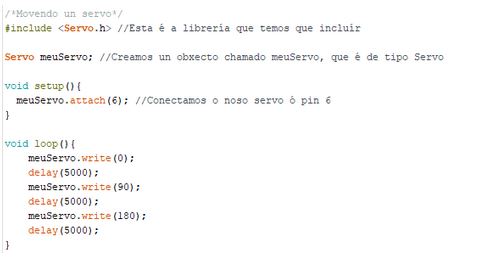
Queremos
controlar a posición do eixe dun servo para que se mova nuns ángulos determinados.
Os motores de corrente contínua cos que traballamos habitualmente no taller non se poden conectar directamente a un pin de Arduino pois necesitan máis intensidade de corrente que a que éste lles pode proporcionar. Pódese solucionar conectando un amplificador con transistor ou un circuito integrado xa deseñado para este fin, que nos vai a permitir controlar a velocidade e o sentido de xiro.
Os servomotores levan no mesmo corpo un motor con reductora e un sistema de control que nos permite conseguir movementos angulares do eixe moi precisos. Estes sí os podemos conectar directamente a un pin de Arduino.
Aínda que pode haber servos de rotación contínua, que permiten controlar velocidade e sentido de xiro, os estándar que permiten controlar o ángulo teñen un xiro de 180º.

Normalmente contrólanse por medio de pulsos dunha anchura determinada, como os que proporcionan as saídas PWM do Arduino. Compre consultar as características que nos da o fabricante para adaptar o noso programa.



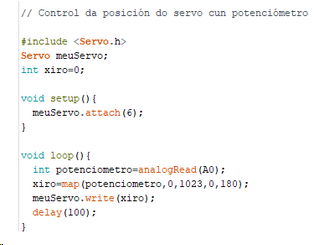
Queremos
Controlar a posición do servo cun potenciómetro.
Neste caso imos a utilizar a entrada analóxica que nos proporciona o potenciómetro para controlar unha saída PWM á que conectaremos o servo.
Recorda que os sinais analóxicos convertíanse en sinais dixitais con valores entre 0 e 1023, e por outra parte as saídas PWM podían variar entre 0 e 255. No caso dos servos indícaselles directamente os graos a xirar: de 0 a 180.
É preciso facer unha conversión entre os dous rangos de valores coa función mapear.


Licenciado baixo a Licenza Creative Commons Recoñecemento Compartir igual 4.0