
Proxecto Escornabot 18/19
Section outline
-

Contidos
-Montaxe e posta en marcha do Escornabot como ferramenta metodolóxica.
-Realización de Taboleiros
-Programar o Arduino
-Crear un banco de xogos coas súas dinámicas
-Xogar
Fontes empregadas:
- Proxecto «Escornabots nas Bibliotecas Escolares» da plataforma platega.
- Docencia recibida: Isabel Blanco
-
Seguro que vos estaredes preguntando... Que é un Escornabot?
O ESCORNABOT, Unha historia de cacharros, poderes e compartición "É un proxecto de código/hardware aberto que ten por obxectivo achegar a robótica e a programación aos nenos/as”.
"Trátase de programar para aprender e non tanto de aprender a programar... Programar é falar coas máquinas e que ademáis te entendan." Alberto Méndez.
Contamos con asesoría permanente na Wiki de escornabot. EscornaWiki
Os obxectivos do proxecto son:
-
Promover unha actitude positiva cara á tecnoloxía e a aprendizaxe activa.
-
Familiarizarse e adquirir confianza na construcción e manipulación de obxectos tecnolóxicos.
-
Fomentar os valores da cultura libre, o traballo cooperativo, a tecnoloxía como medio de participación cidadá, no contexto da biblioteca escolar.
-
Coñecer os fundamentos técnicos básicos de robótica, electrónica e programación.

-
-
Presentación didáctica de Tucho Méndez
-
1. As guías de montaxe de escornabot.
2. Partes e materiais dun robot.
3. Ensamblaxe e cableado.
4. Montaxe física dos robots.
5. Documentación do proceso.

-
1. Acceso ao rexistro de actividades con Escornabot.
2. Análise e curación de actividades.
3. Elaboración e publicación dunha proposta de actividade con Escornabot no contexto da aula.
4. Propostas de uso en atención á diversidade.
5. Creación dun banco de recursos e fichas didácticas
-
Aplicación de Google para editar novos taboleiros:
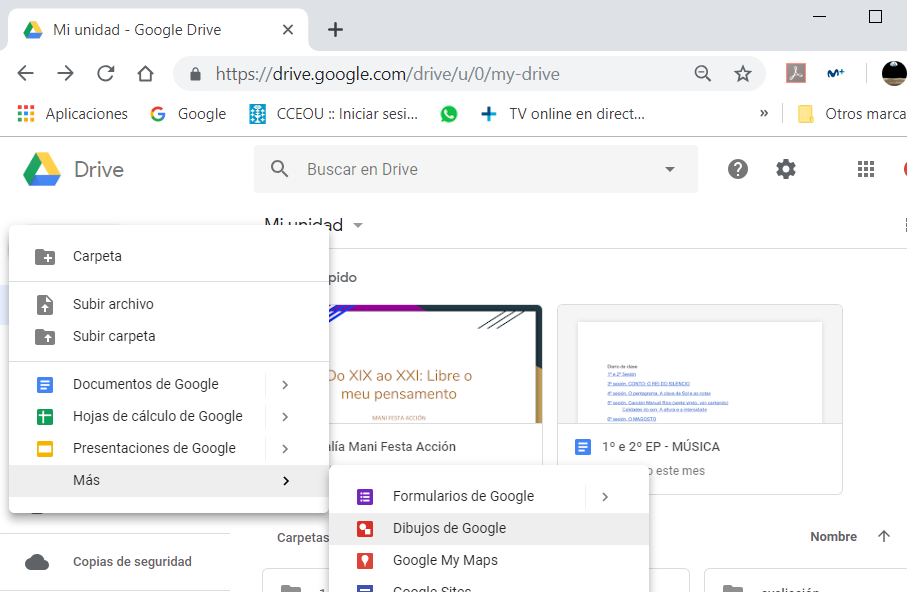
Accedemos a Google Drive coa nosa conta de gmail
Pica en Nuevo > Más > Dibujos de Google
Escribe un título:

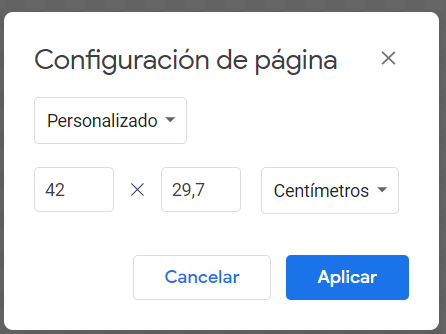
Configura a páxina: Archivo > Configuración de páxina > personalizado -> 42 x 29,7 cm (Tamaño A3)
Podemos debuxar as liñas de forma manual debuxando 3 liñas verticais a 10 cm e 2 horizontais, para guiarte activa ver> Mostrar regla.
Tamén se pode inserir a plantilla do taboleiro como unha imaxe.

Agora xa temos o taboleiro só teriamos que ir engadindo as imaxes. Pódense subir do ordenador, copiar a URL da imaxe (copiar a localización da imaxe) ou ir a buscar directamente buscar na web. Temos a opción de cambiar o tamaño, de movelas para a cela que queiramos.
Tamén podemos engadir texto: Inserir > WordArt ou tamén cadros de texto.

A plantilla quedaría gardada na nube.
Para imprimila podes gardala en diferentes formatos.
Archivo > Descargar como > Pdf, Jpg, Png...
Plantilla taboleiro
-
1. Uso da distribución Meikian Live.
2. Instalación da contorna de Arduino.
3. Ola Mundo en Arduino.
4. Instalación da biblioteca de movementos de Escornabot.
5. Creación e documentación dun programa coa biblioteca de movementos
-
Instalar o IDE de Arduino e o software de Escornabot.
Os pasos a seguir serían:
- Descarga e instalación do entorno de programación (IDE) de Arduino. Na páxina oficial atoparedes as instruccións precisas.
- 1(Só para Windows) Precisaredes instalar uns drivers para que o voso equipo se poida comunicar co arduino. Nesta páxina, por exemplo, podedes ver como facelo.
- Descarga e instalación do firmware de escornabot dende os recursos do tema. Descomprimides o arquivo e o metedes no voso directorio de proxectos de Arduino, que se chama "sketchbook". Con isto, deberiades poder abrilo dende Arquivo → Proxecto (ou Sketchbook segundo a versión do IDE).
- Descarga e instalación da biblioteca de movementos dende os recursos do curso. Tedes as instruccións para a instalación da mesma na páxina de Prometec, un recurso en liña que podedes gardar nos vosos favoritos e no que podedes atopar un montón de información sobre electrónica e Arduino en particular.
Con isto,teredes todo o preciso para funcionar con escornabot, comunicarte co seu Arduino, modificar o seu comportamento, empregar a biblioteca de movementos...
-Descargar o programa Escornabot-1.2.zip desde a sección de recursos deste tema.
-Descomprimir o ficheiro e pegar o cartafol resultante "Escornabot" no cartafol sketchbook. En Linux estará en /home/sketchbook e en Windows normalmente estará en algo como Usuario/MisDocumentos/Arduino.
-Con isto, ao abrir o Arduino IDE, desde Archivo/proyecto debería aparecer o programa Escornabot, con cargalo no robot como calquera outro programa.
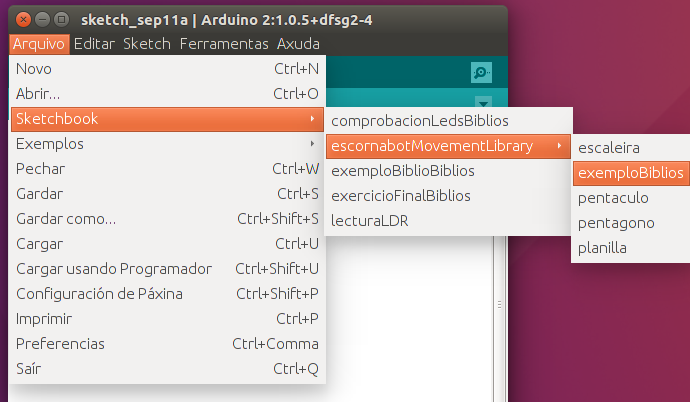
Exemplo de captura:

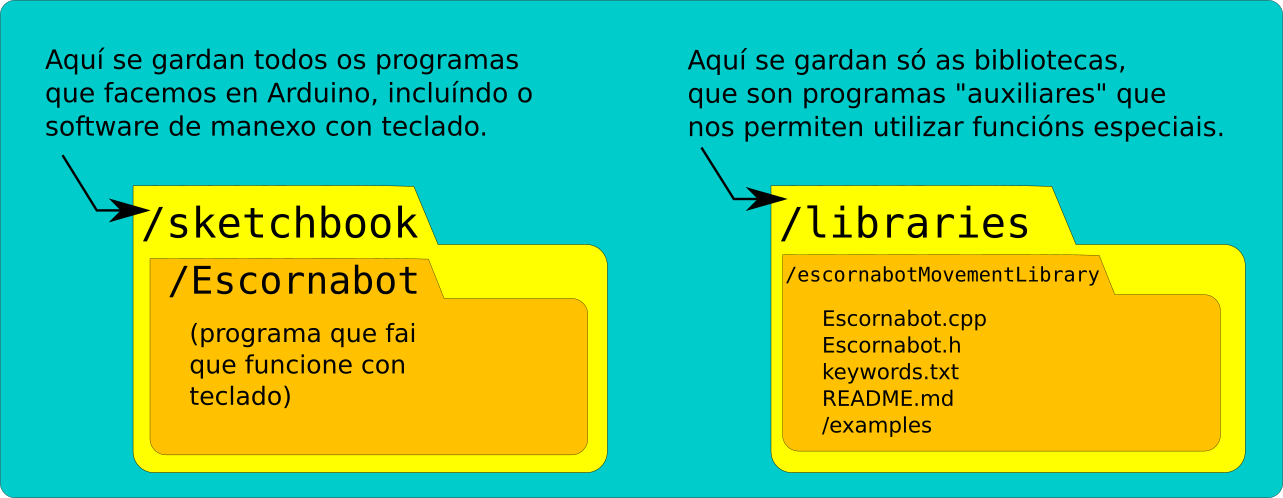
O importante é que estea clara a diferenza entre o programa de escornabot e a biblioteca de movementos.
- O software "Escornabot" é o que fai que o robot se manexe desde o teclado de xeito normal. Este é un programa "ordinario" de Arduino, e por iso debe ir dentro do cartafol "sketchbook" e, no Arduino IDE, se accederá a el desde "Archivo > Proyecto > Escornabot".
- O cartafol "escornabotMovementLibrary" é unha biblioteca. Isto é, un programa "auxiliar" no que nós non traballamos, senón que fai que poidamos utilizar instruccións que non son nativas en Arduino. Por exemplo, "escornabot.andaCm(10);" non existe en Arduino, está definida na biblioteca e só a poderemos usar se colocamos a biblioteca no lugar axeitado. Todas as bibliotecas van dentro de "libraries", cada unha delas nun cartafol independente.
Inclúo unha imaxe a ver se aclara un pouco todo o tema este dos cartafois...
- Descarga e instalación do entorno de programación (IDE) de Arduino. Na páxina oficial atoparedes as instruccións precisas.
-
A biblioteca de movementos de escornabot está pensada para poder programar o robot con distintos xiros e avances desde un ordenador, empregando comandos sinxelos de texto.
Comandos
As instruccións máis importantes que lle podemos dar ao escornabot son:
- siBotonIr();
- Fai que o escornabot comece a executar o programa cando lle damos a un botón, non en canto carga o programa.
- andaCm(10);
- O escornabot andaría, neste caso, 10 cm. cara adiante. Se lle metemos un valor negativo, andaría cara atrás.
- xiraGraos(60);
- Neste caso, o escornabot xiraría 60 graos en sentido horario. Con números negativos, xira en sentido antihorario.
- para(1000);
- O escornabot detense por un tempo en milisegundos, neste caso quedaría un segundo quedo.
- pita(500);
- Emitiría un pitido de 500 milisegundos (medio segundo).
Exemplo
Se tes a biblioteca instalada, podes ir a "Arquivo>sketchbook>escornabotMovementLibrary>exemploBiblios" e tes un programa moi sinxelo do que podes partir para facer o teu.
Notas importantes
- É moi importante respectar maiúsculas e minúsculas, calquera mínima diferenza no código fai que este non funcione.
- Todas as instruccións van rematadas por un punto e coma.
- Todos os parénteses, aspas, corchetes, chaves... abertos deben pecharse nalgún lugar.
- Aínda que poidan parecer difíciles de descifrar, as mensaxes de erro que nos aparecen en laranxa cando hai algún problema nos poden axudar a corrixilos.
- siBotonIr();
