
Instalar o IDE de Arduino e o software de Escornabot.
Section outline
-
Instalar o IDE de Arduino e o software de Escornabot.
Os pasos a seguir serían:
- Descarga e instalación do entorno de programación (IDE) de Arduino. Na páxina oficial atoparedes as instruccións precisas.
- 1(Só para Windows) Precisaredes instalar uns drivers para que o voso equipo se poida comunicar co arduino. Nesta páxina, por exemplo, podedes ver como facelo.
- Descarga e instalación do firmware de escornabot dende os recursos do tema. Descomprimides o arquivo e o metedes no voso directorio de proxectos de Arduino, que se chama "sketchbook". Con isto, deberiades poder abrilo dende Arquivo → Proxecto (ou Sketchbook segundo a versión do IDE).
- Descarga e instalación da biblioteca de movementos dende os recursos do curso. Tedes as instruccións para a instalación da mesma na páxina de Prometec, un recurso en liña que podedes gardar nos vosos favoritos e no que podedes atopar un montón de información sobre electrónica e Arduino en particular.
Con isto,teredes todo o preciso para funcionar con escornabot, comunicarte co seu Arduino, modificar o seu comportamento, empregar a biblioteca de movementos...
-Descargar o programa Escornabot-1.2.zip desde a sección de recursos deste tema.
-Descomprimir o ficheiro e pegar o cartafol resultante "Escornabot" no cartafol sketchbook. En Linux estará en /home/sketchbook e en Windows normalmente estará en algo como Usuario/MisDocumentos/Arduino.
-Con isto, ao abrir o Arduino IDE, desde Archivo/proyecto debería aparecer o programa Escornabot, con cargalo no robot como calquera outro programa.
Exemplo de captura:

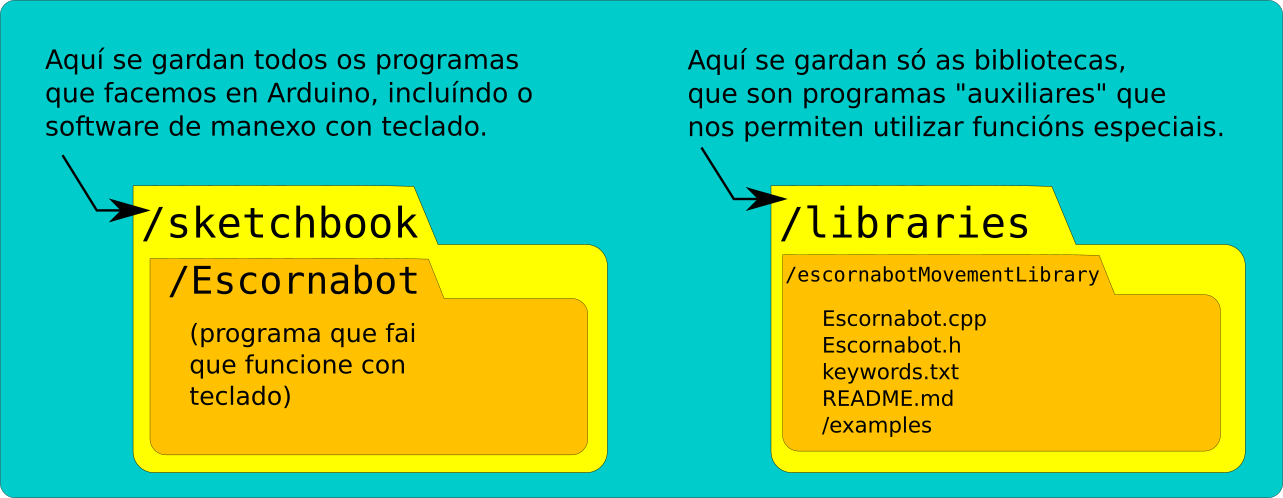
O importante é que estea clara a diferenza entre o programa de escornabot e a biblioteca de movementos.
- O software "Escornabot" é o que fai que o robot se manexe desde o teclado de xeito normal. Este é un programa "ordinario" de Arduino, e por iso debe ir dentro do cartafol "sketchbook" e, no Arduino IDE, se accederá a el desde "Archivo > Proyecto > Escornabot".
- O cartafol "escornabotMovementLibrary" é unha biblioteca. Isto é, un programa "auxiliar" no que nós non traballamos, senón que fai que poidamos utilizar instruccións que non son nativas en Arduino. Por exemplo, "escornabot.andaCm(10);" non existe en Arduino, está definida na biblioteca e só a poderemos usar se colocamos a biblioteca no lugar axeitado. Todas as bibliotecas van dentro de "libraries", cada unha delas nun cartafol independente.
Inclúo unha imaxe a ver se aclara un pouco todo o tema este dos cartafois...
- Descarga e instalación do entorno de programación (IDE) de Arduino. Na páxina oficial atoparedes as instruccións precisas.