
Curso de Introdución á robótica na educación primaria 17/18
Section outline
-
Identificando compoñentes

Curso de Introdución á robótica na educación primaria.

Obradoiro de montaxe no Ceip Vistahermosa Convocatoria -
A placa mCore Conectando periféricos na placa 
 1. Montamos os motores, para iso precisamos 4 parafusos longos e as porcas
1. Montamos os motores, para iso precisamos 4 parafusos longos e as porcasAparafusando motores 
 2. Colocámoslle os zapatiños ás rodas e aparafusamos. Xiramos o chasis e na parte frontal colocamos o sensor seguidor de liña e a mini roda auxiliar centrado nos buratos do medio. Empregamos 2 parafusos M4X8, cambiamos o desaparafusador ao modo Allen
2. Colocámoslle os zapatiños ás rodas e aparafusamos. Xiramos o chasis e na parte frontal colocamos o sensor seguidor de liña e a mini roda auxiliar centrado nos buratos do medio. Empregamos 2 parafusos M4X8, cambiamos o desaparafusador ao modo AllenMontando rodas 
 3. De seguido aparafusamos o sensor de ultrason na parte dianteira con 2 parafusos de cabeza allen m4x84. No chasis, aparafusaremos os 4 pernos de latón M4x255. Colocamos os cables nos conectores e sacamos os cables por este burato, á espera de montar a placa6. Collemos a MCore, abrímola e colocamos con moito coidadiño o módulo Bluetooth. Ollo ao encaixar os pins!
3. De seguido aparafusamos o sensor de ultrason na parte dianteira con 2 parafusos de cabeza allen m4x84. No chasis, aparafusaremos os 4 pernos de latón M4x255. Colocamos os cables nos conectores e sacamos os cables por este burato, á espera de montar a placa6. Collemos a MCore, abrímola e colocamos con moito coidadiño o módulo Bluetooth. Ollo ao encaixar os pins!Colocamos con coidado o módulo Bluetooth 
 7. Colocamos a batería de litio no soporte, sacando o cable pola fendedura lateral da caixiña e volvemos a pechala.8. Aparafusamos a mcore ao chasis, cos 4 parafusos M4x89. E por último conectamos os cables:Sensor de ultrasóns no porto 3Sensor segue liñas no porto 2Matriz Leds no porto 1... e xa solo queda probalo!
7. Colocamos a batería de litio no soporte, sacando o cable pola fendedura lateral da caixiña e volvemos a pechala.8. Aparafusamos a mcore ao chasis, cos 4 parafusos M4x89. E por último conectamos os cables:Sensor de ultrasóns no porto 3Sensor segue liñas no porto 2Matriz Leds no porto 1... e xa solo queda probalo!Colocamos a placa e quédanos o cableado 

-
OLA MUNDO!O noso primeiro contacto coa linguaxe de programación consistirá en acender e apagar as lámpadas (diodos LED RGB) internos da placa MCore, acendéndoas de cor azul, esperar 2 segundos e apagar.Ola mundo: acender/apagar LEDs da PlacaReto 1: Simular a iluminación dun semáforo utilizando un LED interno da placa, neste caso o dereito (secuencia verde - amarelo - vermello). Para conseguir a cor amarela, teremos que combinar a cor vermello e verde.
 Reto 2: Coordinar dous semáforos.
Reto 2: Coordinar dous semáforos.
-
COÑECENDO OS MÓDULOS ELECTRÓNICOS DO MBOT 1/3
Indicador de Temperatura  Este sensor indícalle á placa a temperatura do obxecto en contacto coa parte metálica da sonda.Pódese sumerxir grazas ao cable e tamén detectar temperaturas de corpos máis separados da placa.Conéctase a MCore a través dun Módulo Adaptador RJ25
Este sensor indícalle á placa a temperatura do obxecto en contacto coa parte metálica da sonda.Pódese sumerxir grazas ao cable e tamén detectar temperaturas de corpos máis separados da placa.Conéctase a MCore a través dun Módulo Adaptador RJ25Módulo display de 7 segmentos 
Placa que contén un visualizador de números de ata 4 díxitos. Cada díxito está formado por unha cuadrícula de 7 liñas que se chaman segmentos. Matriz de LEDs
Conéctase ao porto 1 da MCore
É unha pantalla formada por 128 lámpadas chamadas LEDs. Están colocadas formando unha táboa ou matriz de 8 filas e 16 columnas. Cada LED pode acenderse e apagarse por separado polo que pode mostrar na pantalla números, letras ou debuxos en función das lámpadas que acendamos ou apaguemos.Reto 1: Ler a temperatura detectada pola sonda no display de 7 segmentos Reto 2: Cando a temperatura sexa superior a 25 º emitir son e acender luz vermella da placa
Reto 2: Cando a temperatura sexa superior a 25 º emitir son e acender luz vermella da placa Reto 3: Mostrar a temperatura da sonda na pantalla LED
Reto 3: Mostrar a temperatura da sonda na pantalla LED
-
COÑECENDO OS MÓDULOS ELECTRÓNICOS DO MBOT 2/3
Sensor de luz 
Con esta placa o robot poderá saber se a luz ambiente está acendida ou apagada, e en función da cantidade de luz que detecte, decidir como actuar (por exemplo acender unha luz propia) Reto 1: Variar a intensidade da luz: Se hai pouca luz ambiente que baixe a intensidade dos LED. Para iso creamos unha variable "Valor" en Datos e Bloques
Sensor PIR 
Detecta movementos nun entorno cercano. Pode utilizarse como sensor de presenza e interruptor. Reto 2: Se detecta movemento emitir sonido e acender luz vermella.
Módulo Potenciómetro 
Contén un mando que pode xirarse ata 270º. En función da posición do mando (de 0-1024) pódese programar a placa MCore para controlar a velocidade dos motores, a intensidade da luz do módulo de LEDs, ... Reto 3: Establecer a cor do LED segundo a intensidade do potenciómetro Reto 4: Acender/apagar led segundo a posición do mando do potenciómetro.
Reto 4: Acender/apagar led segundo a posición do mando do potenciómetro.
-
COÑECENDO OS MÓDULOS ELECTRÓNICOS DO MBOT
Módulo de 4 LEDs RGBAs siglas RGB -> red, green, blue
Placa con 4 lámpadas tipo LED cunha característica especial: Poden iluminarse variando a súa cor, podendo conseguir calquera cor do arco da vella. Reto 1: Conseguir que cada LED se ilumine dunha cor diferente
Sensor ultrasóns
Vai conectado no porto 3 da placa MCore
Este sensor permítelle ao robot percibir a distancia dos obxectos e esquivar obstáculos ou dirixirse cara eles.Dispón dun emisor e un receptor de ondas, un evía unha onda e mide o tempo que tarda en volver cando esta choca cun obxecto. En función do tempo, calcula a distancia que hai desde o robot ata o obstáculo.Reto 2: Calcular distancias empregando o sensor de ultrasóns e mostralo na pantalla de LED Reto 3: Sensor de estacionamento: Programar o robot para que emita unha alarma cando se achegue a un obstáculo
Reto 3: Sensor de estacionamento: Programar o robot para que emita unha alarma cando se achegue a un obstáculo
-
SENSOR DE LIÑA
Sensor de liña
No Kit mBot sitúase na parte frontal funcionando por reflexión.
Conectado no porto 2 da MCore
Este sensor ten a capacidade de detectar unha liña negra sobre fondo branco ou unha liña branca sobre fondo negro, é dicir, mide o reflexión da luz sobre a superficie sobre a que se move o robot.
Consta de 2 partes: un LED IR que emite e un fototransistor IR que recibe o sinal. Os dous sensores dun módulo indican se están sobre algo negro ou branco.
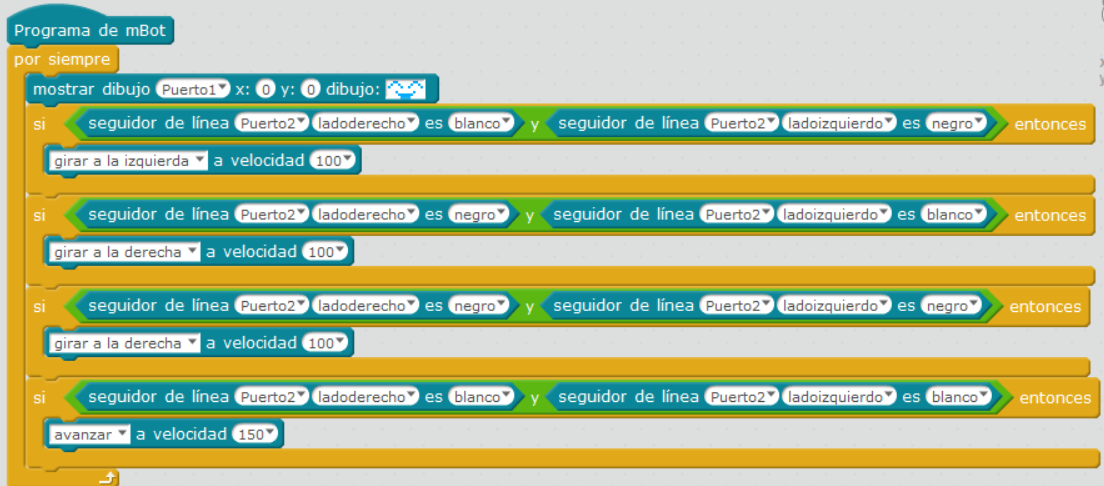
Poderemos usar este sensor para que o robot circule sobre unha liña, creando distintos circuitosÁ hora de programar o sensor teremos en conta os seguintes valores. Segueliñas negroVALORES BINARIOS VALORES DECIMAIS INTERPRETACIÓN PROGRAMAMOS 0 0 
Os dous sensores van pola liña negra e están apagados.
O emisor emite e non recibe nada porque a cor escura absorbe e non reflicteSegue recto 0 1 
O sensor sensor esquerdo vai pola liña negra (está apagado, non emite) e o dereito vai por fóra (luz acendida, reflicte a cor.) Xira á esquerda 1 0 
O esquerdo vai por fóra (luz acendida) e o dereito pola liña negra (apagado) Xira á dereita 1 1 
Os dous sensores van por fóra da liña negra Que se deteña. Velocidade=0
Ou que xire ata atopar a liña negra.Reto: Programa segue liñas Reto: mBot sumo ou tatami
Reto: mBot sumo ou tatami
-
SERVOMOTOR
Servomotor 
Son motores nos que o eixe só pode moverse entre 0º e 180º, só dá media volta. Realizan un movemento de vaivén cara adiante e cara atrás.
Son empregados para movementos de máis precisión. Por exemplo o de unha articulación dun brazoReto: Usar o Servomotor como unha barreira automática coa axuda do sensor de ultrasóns. Reto: Abrir a barreira manualmente empregando o potenciómetro
Reto: Abrir a barreira manualmente empregando o potenciómetro Reto: brazos de boneco saudando
Reto: brazos de boneco saudando
-
Proxecto mBotrato
Grazas ao sensor segueliñas, que está na parte inferior do mBot, este pode moverse seguindo unha liña de xeito automático. O mBot xa ven co programa instalado para seguir unha liña negra sobre fondo braco.
Reto: Programar o mBot para que siga unha liña branca sobre fondo negro.
Hai dúas posibilidades:
a) tendo en conta os sensores de cada módulo (valores decimais 0- 1 -2 -3 ) explicados no tema 6
b) utilizar o bloque do programa mBlock, seguidor de liña


Mentres, o equipo creativo deseña o tapete ou alfrombilla


-
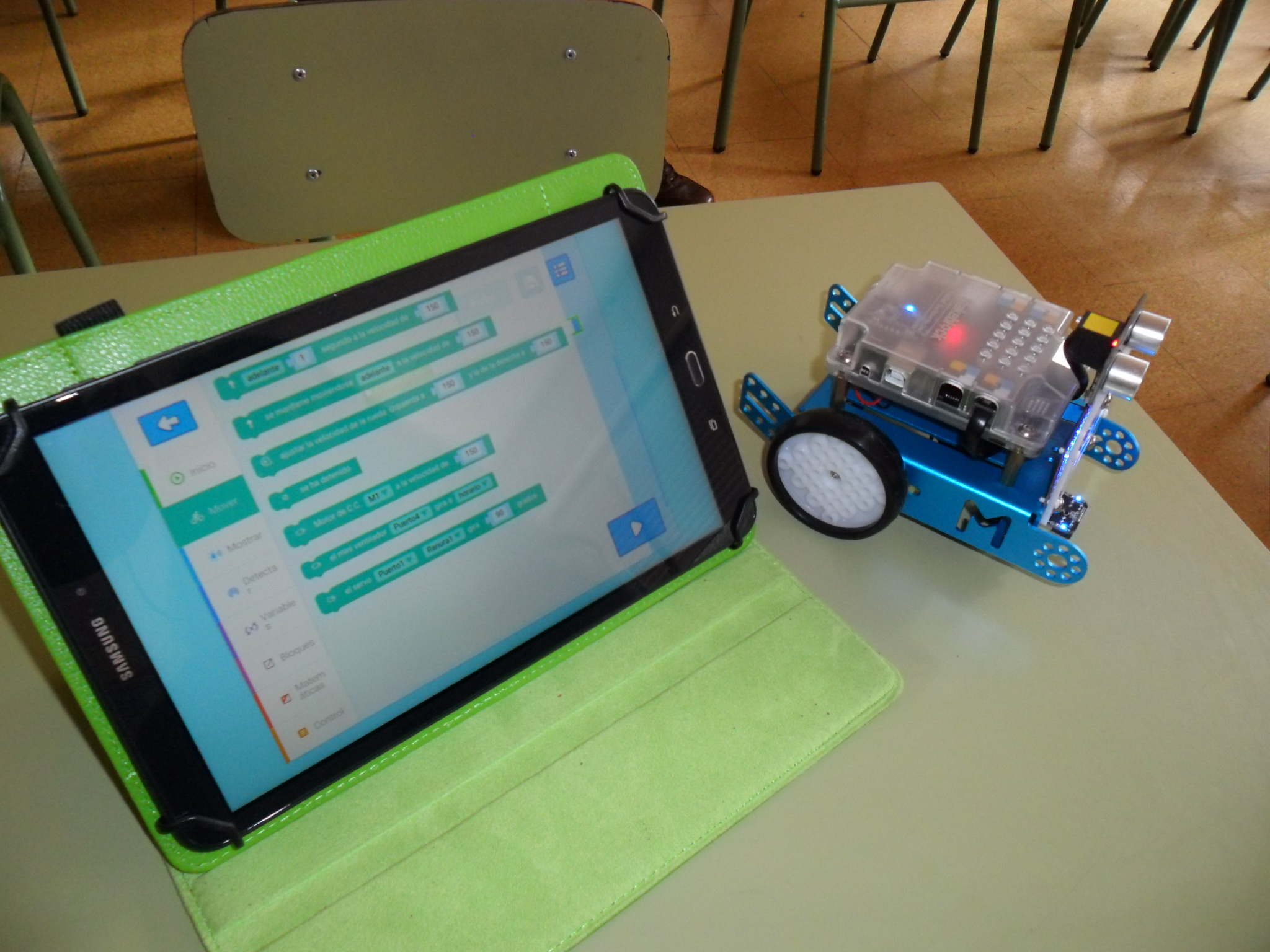
Control do mBot coa app mBlock

Coñecer a app de mBlock para Android e iOS.
Instalar a app nas tablets , activar o Bluetooth achegando o dispositivo ao robot.
Sería recomendable que instaledes a aplicación tamén nos móbiles para familiarizarvos con ela.
Unha vez conectado aparecen dúas opcións:
1. O modo Historia, ofrécenos uns desafíos secuenciados e segundo os vaiamos resolvendo, iránsenos abrindo novos comandos.
2. O modo crear, pódese programar o robot con todos os comandos dispoñibles
-
Como última actividade do seminario propoñemos a fabricación dunha máquina de garabatear xa que é unha forma divertida de experimentar con conceptos STEAM.
"O constructivismo suxire que é máis doado que os nosos alumnos/as desenvolvan ideas novas cando están activamente implicado na fabricacion dun artiluxio."
Imos a precisar:

- Motores de 1,5 a 3 voltios que extraemos de xoguetes, cepillos eléctricos de dentes, mandos playstation...
- Interruptores
- Pilas AA
- Rotuladores para as patas
- Cola termofusible
- Vasos reciclados de plástico, iogur xeado...
- Soldador e estaño.
Pasos a seguir:
1. Soldar o motor ás pilas
2. Facer as conexións para que o circuíto funcione.
3. Pega varios rotuladores ao vaso para que debuxen sobre un papel o movemento errático do robot.
4. Colocar contrapesos no motor: un trozo de cola termofusible. Ir probando a cambiar o tamaño da aspa, a posición e ver como varía o movemento.
