Sensor de ultrasóns
Requisitos de finalización
![]()
Para que sirve?:
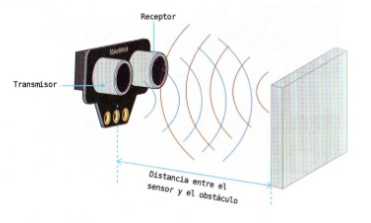
O sensor de ultrasóns (na imaxe inferior) detecta calquera obxecto que teña diante (distancias ata 2-3 m aproximadamente).

Este módulo electrónico emite unha onda de son e determina a distancia entre o sensor e un obxecto sobre o que rebota o son emitido polo sensor e baséase no tempo que tarda a onda desde que sae do sensor, ata que volve a el.
Tino Fernández Cueto en Guía de montaje del robot mbot Ranger CC BY 4.0.
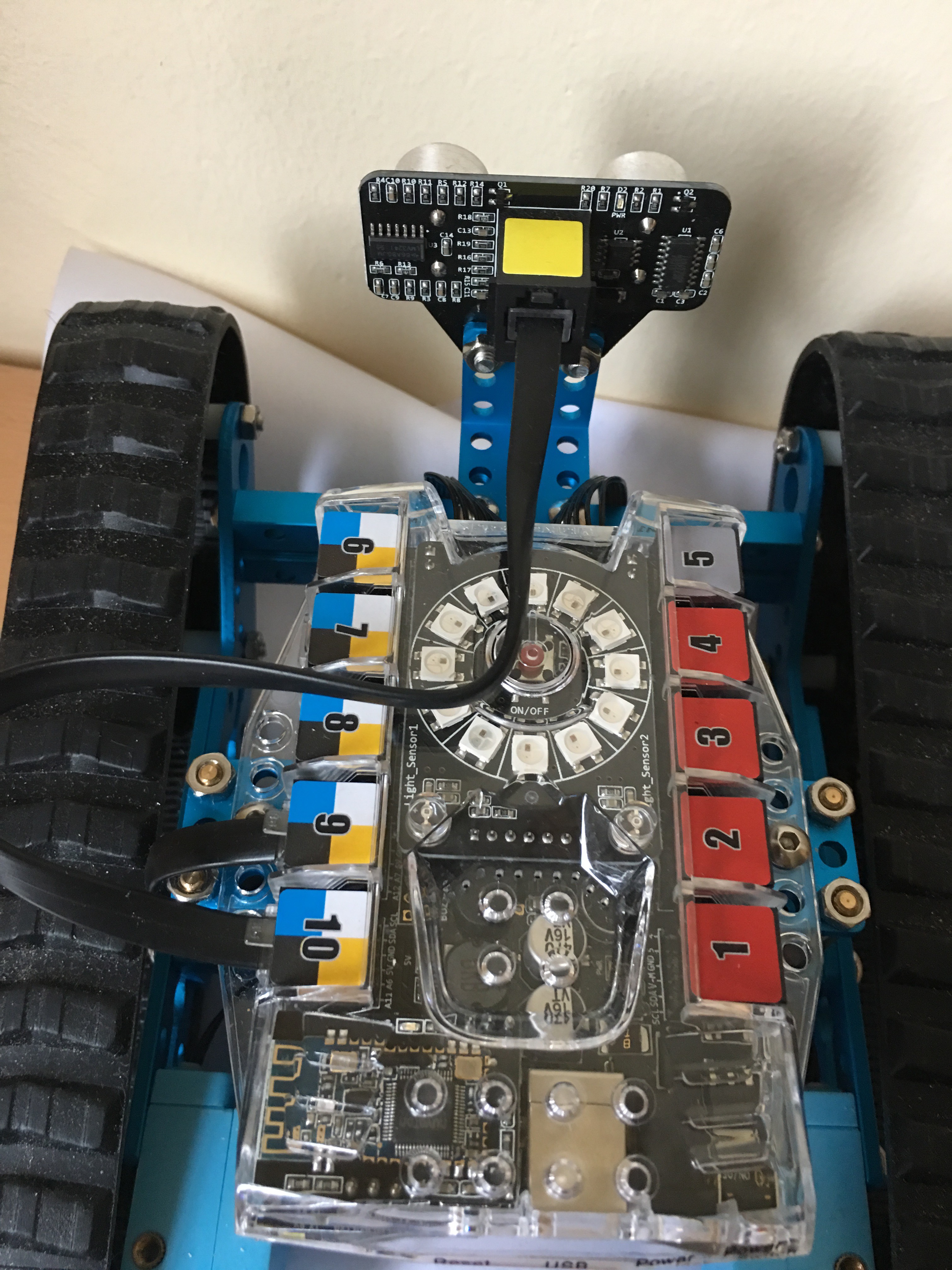
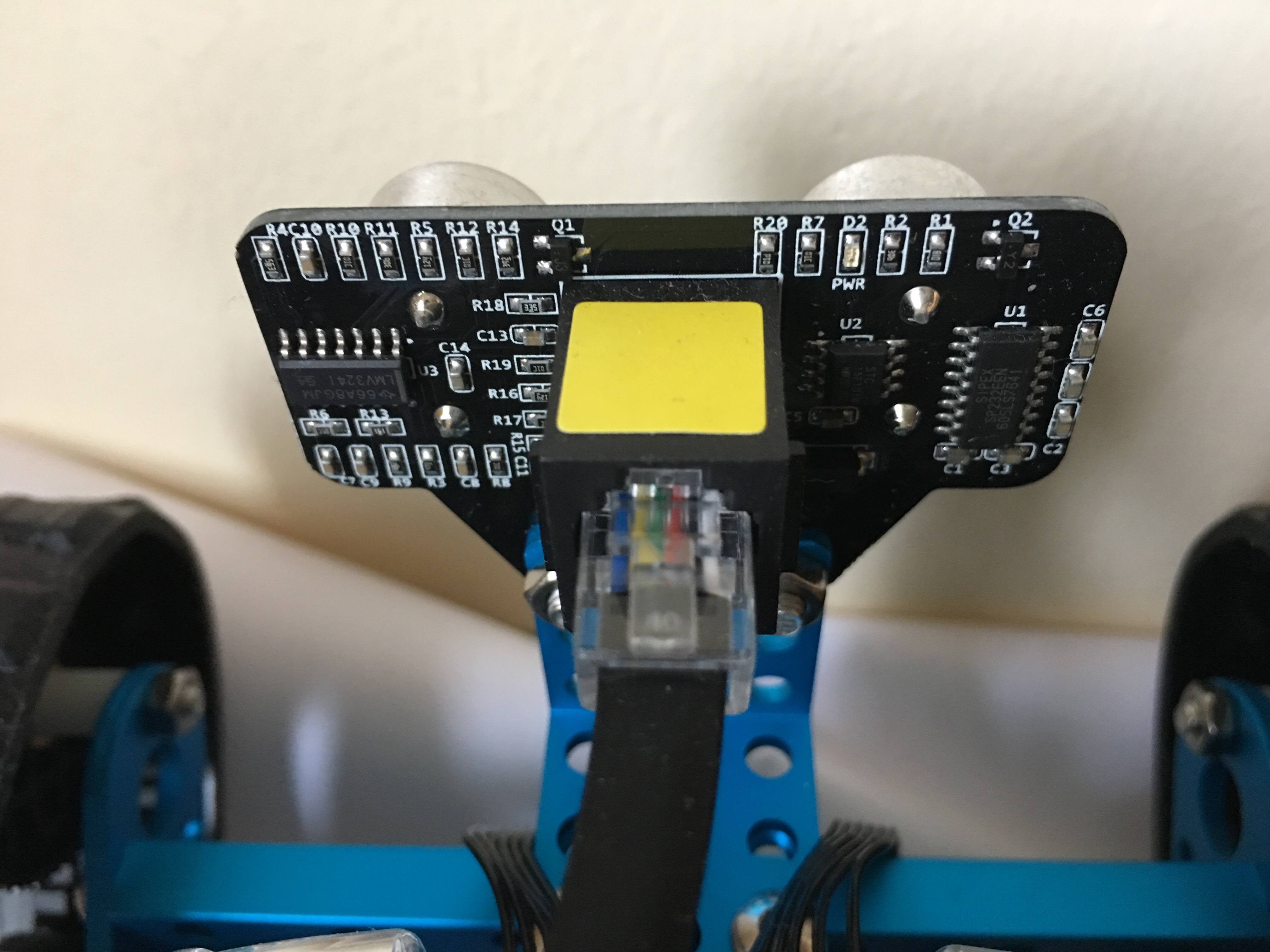
Conexión do sensor de ultrasóns á placa Me Auriga:
O sensor se conecta á placa Me Auriga a través dos portos que mostran etiqueta azul (6-10). Nas actividades seguintes está conectado ao porto 10.
![]()
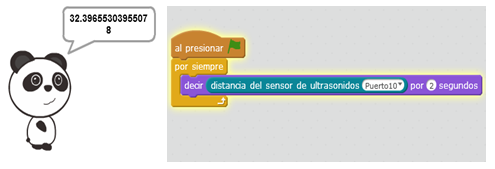
- Sensor ultrasóns-1: Conectar o sensor ao porto 10 e copiar o seguinte programa. Co robot conectado ao ordenador anotar as medicións que se observan, colocando un obxecto a diferentes distancias:

SOLUCIÓN:
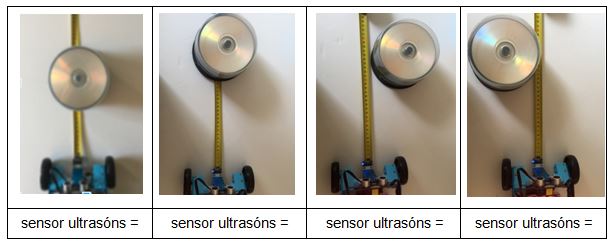
Toma as medidas necesarias ata pescudar:
-
-
- Relación entre a distancia e a medida do ultrasóns
- Ata que distancia é quen de detectar obxectos?
- Que “vision lateral” ten? Podemos diferenciar se detecta un obxecto á dereita ou á esquerda?.
-
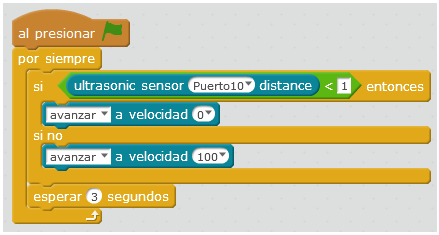
- Sensor ultrasóns-2: Deseñar un programa no que o robot avance ata que atope un obxecto, e cando o atope que pare.
SOLUCIÓN:
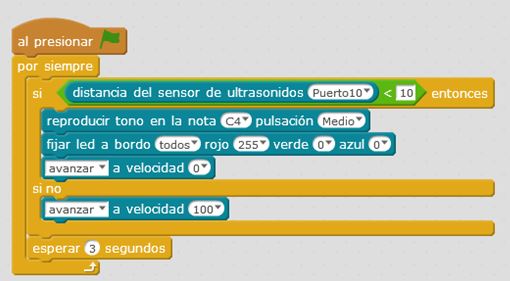
- Sensor ultrasóns-3: Deseñar un programa no que cando a distancia dun obxecto ó sensor de ultrasón sexa inferior a 10 cm, comece a soar unha alarma, e se acenda a matriz de LEDs en cor vermello, aumentando a intensidade da cor conforme a distancia se vaia reducindo.
SOLUCIÓN:
- Sensor ultrasóns-4: Deseñar un programa no que cando a distancia dun obxecto ó sensor de ultrasón sexa inferior a 20 cm, comece a soar unha alarma, e se acenda a matriz de LEDs en cor vermello, diminuíndo a intensidade da cor conforme a distancia se vaia reducindo.
SOLUCIÓN:

Última modificación: martes, 18 de julio de 2017, 12:19