Sensor segueliñas
![]()
Para que sirve?:
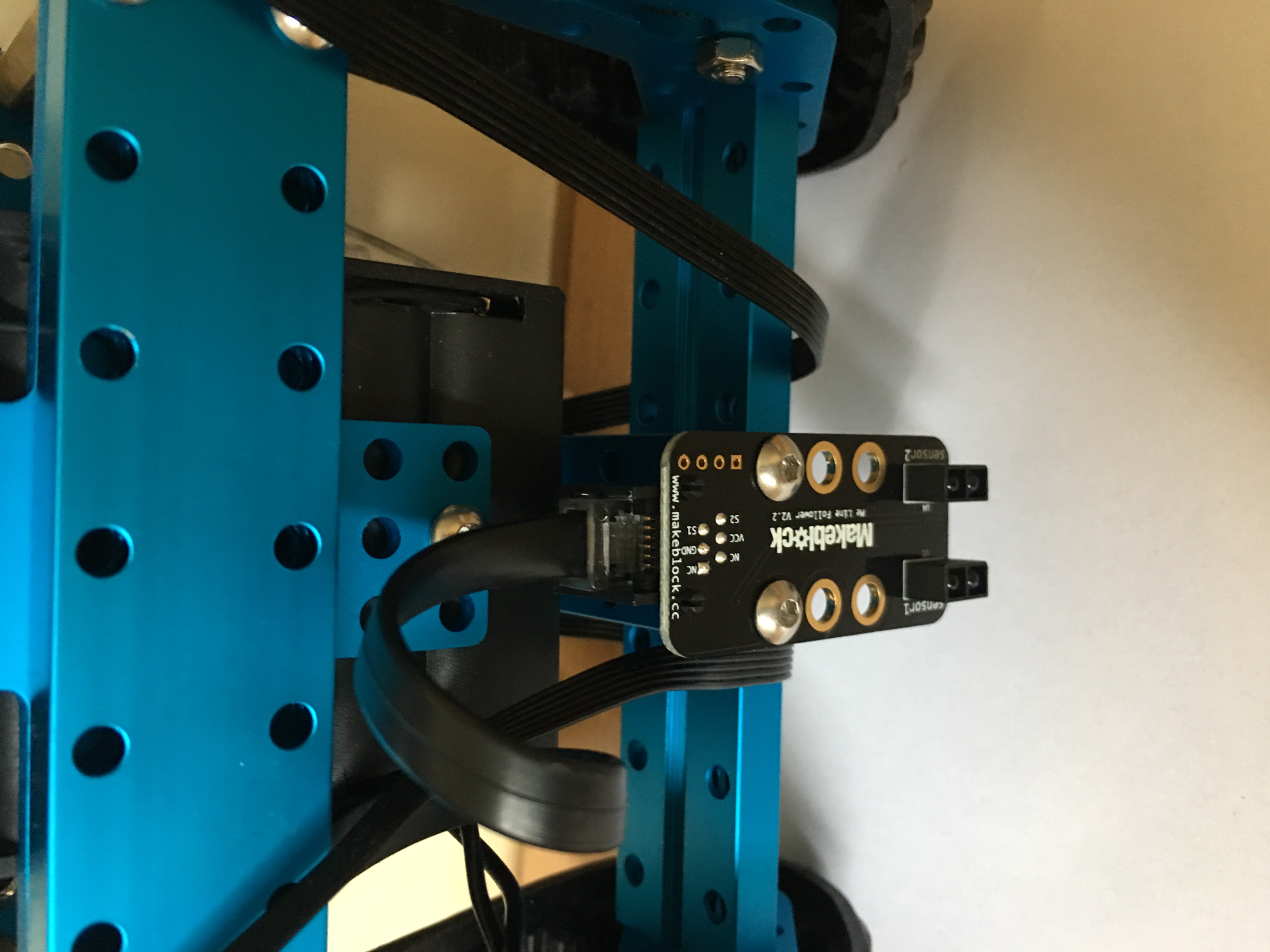
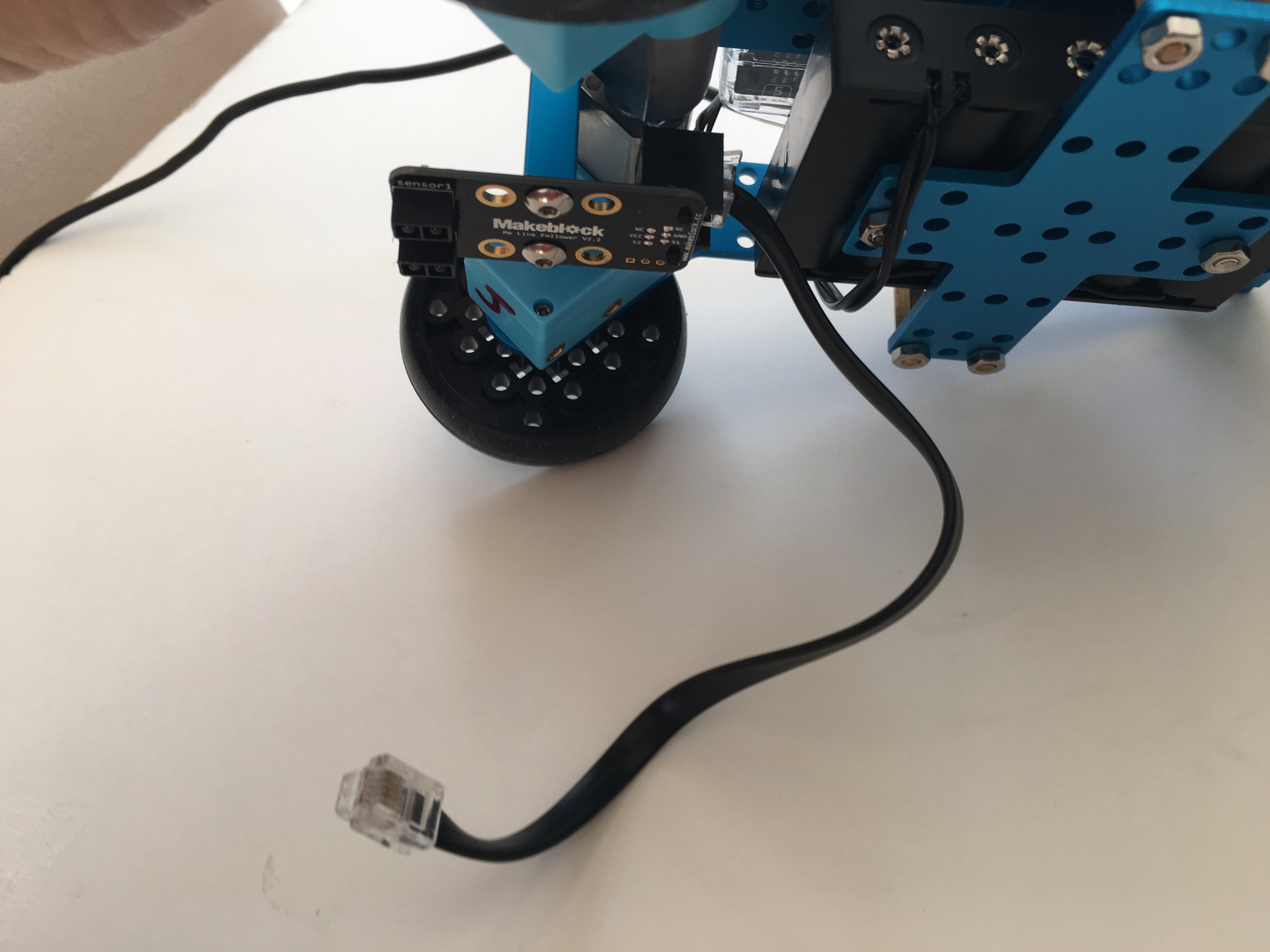
O sensor segueliñas vai detectar liñas ou obxectos próximos.
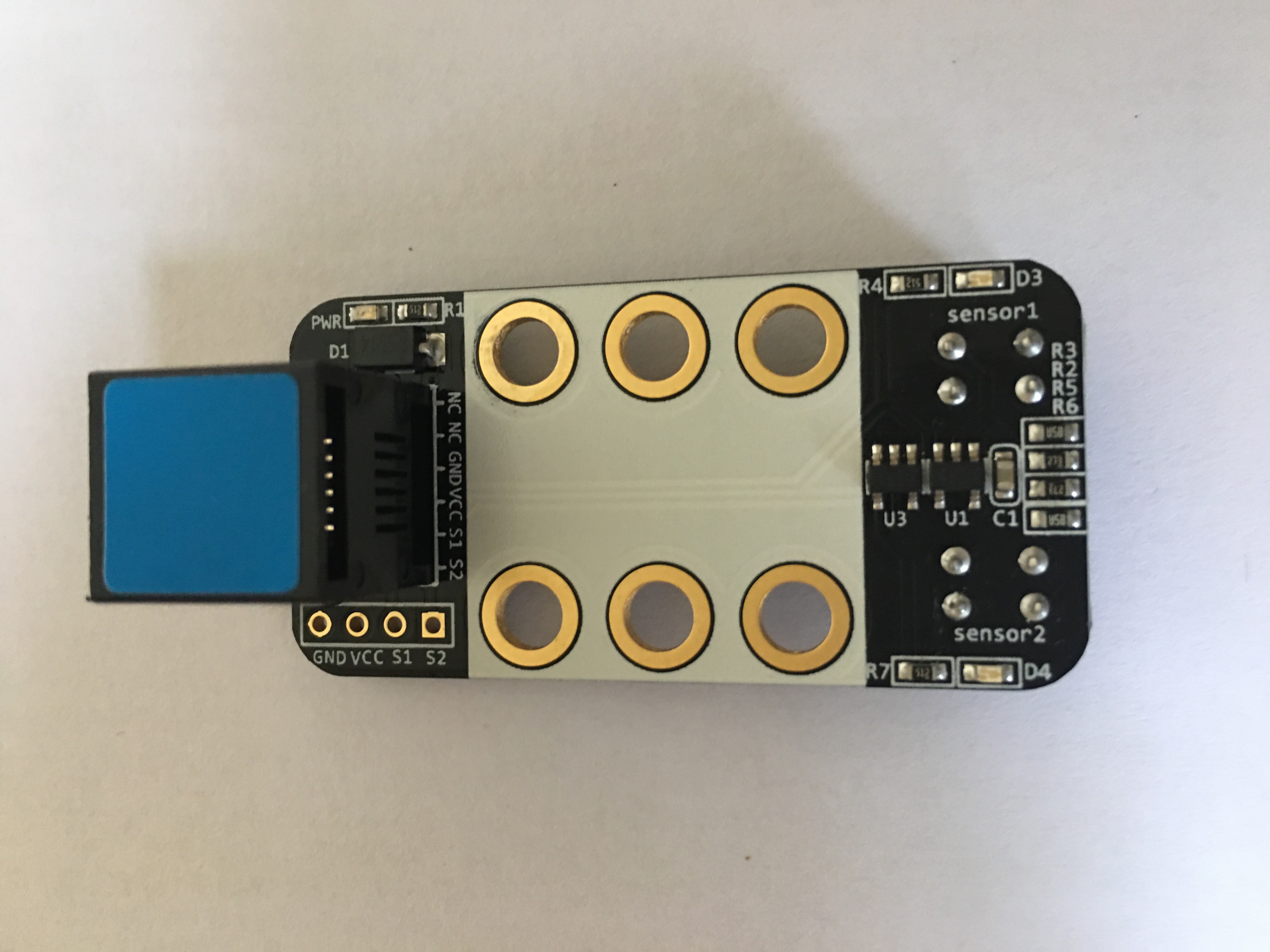

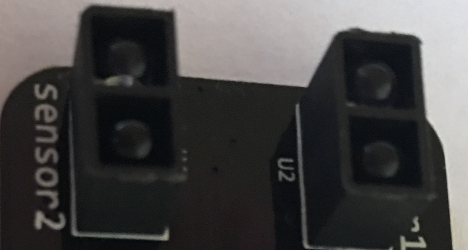
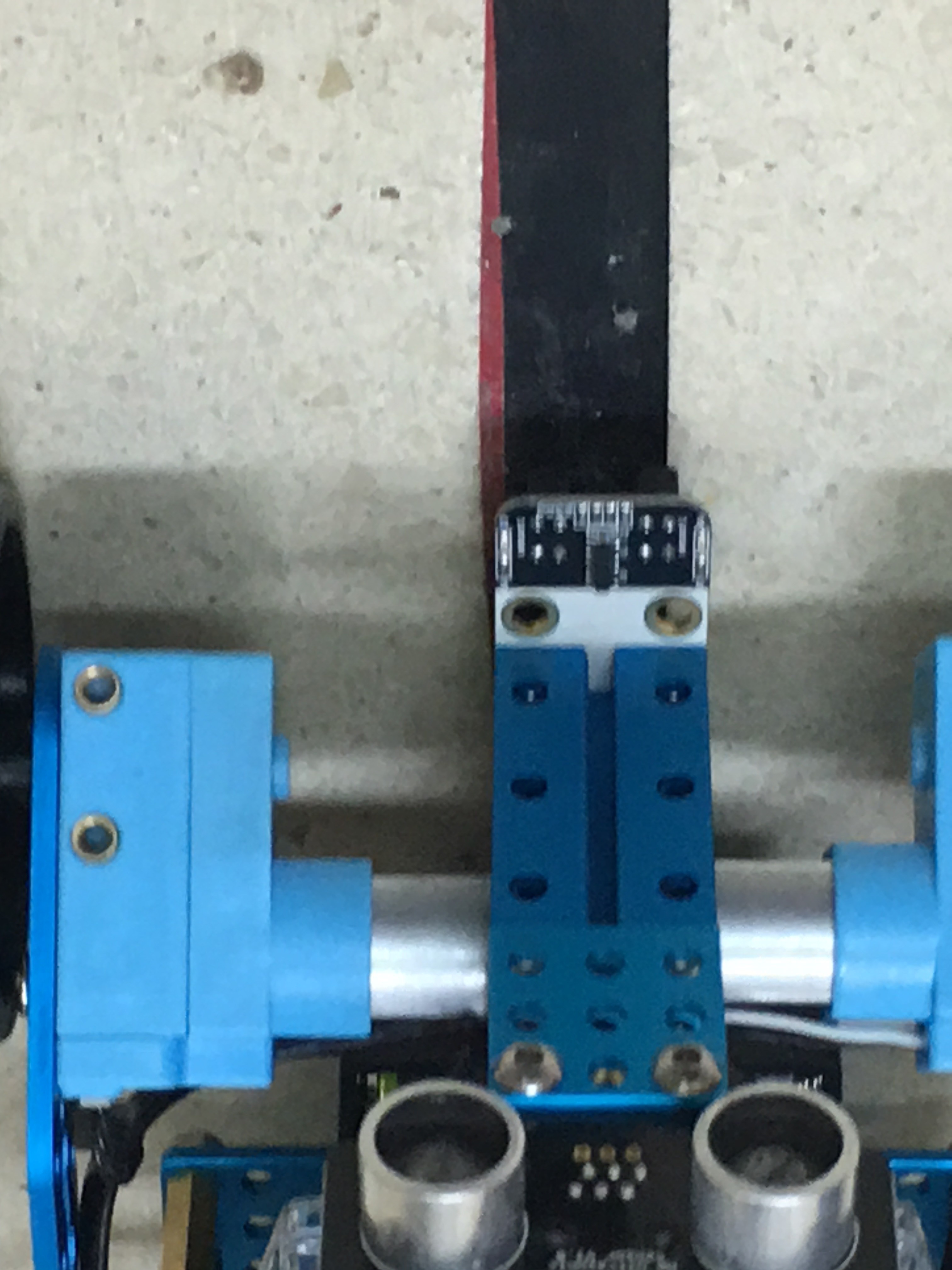
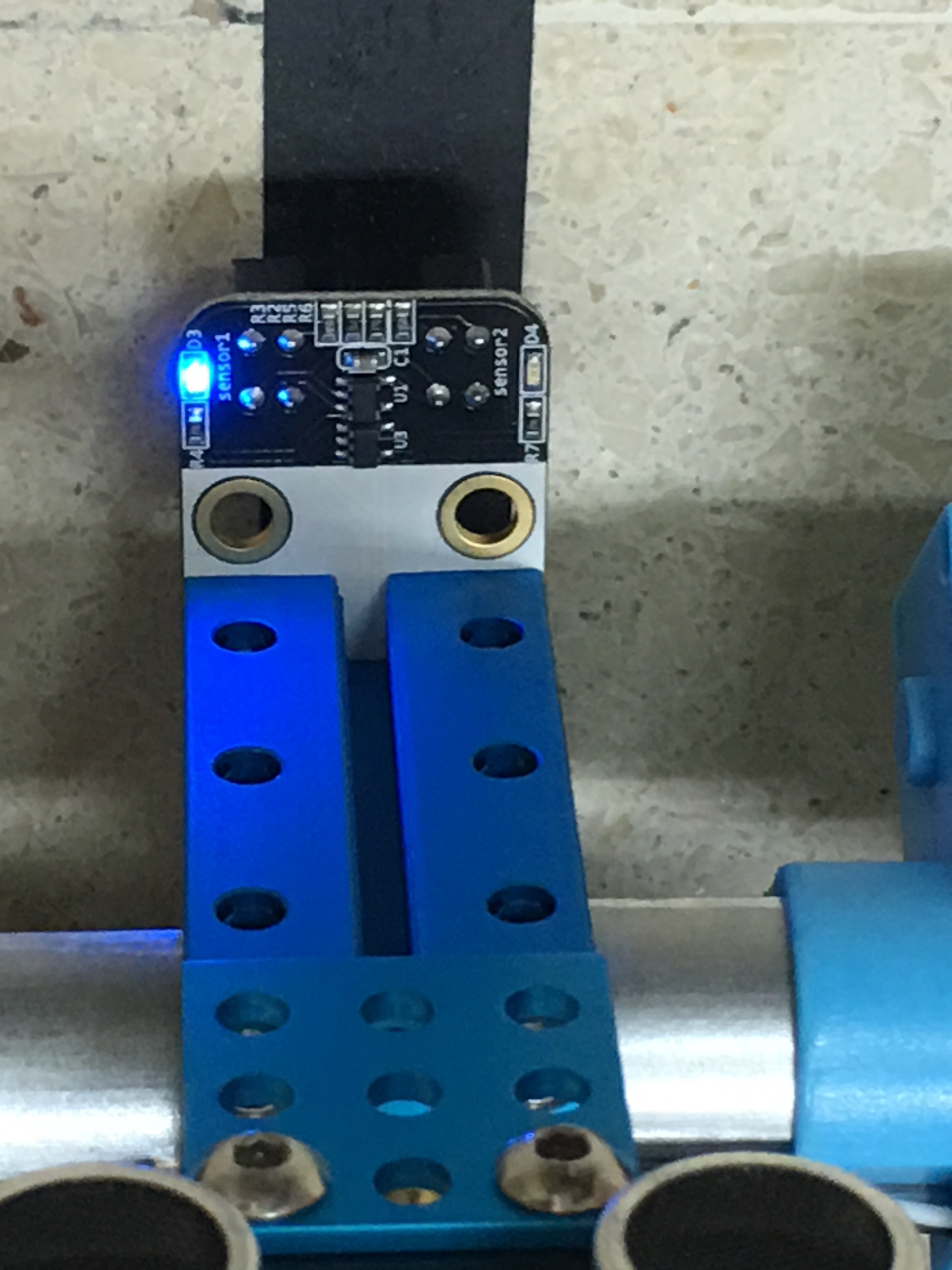
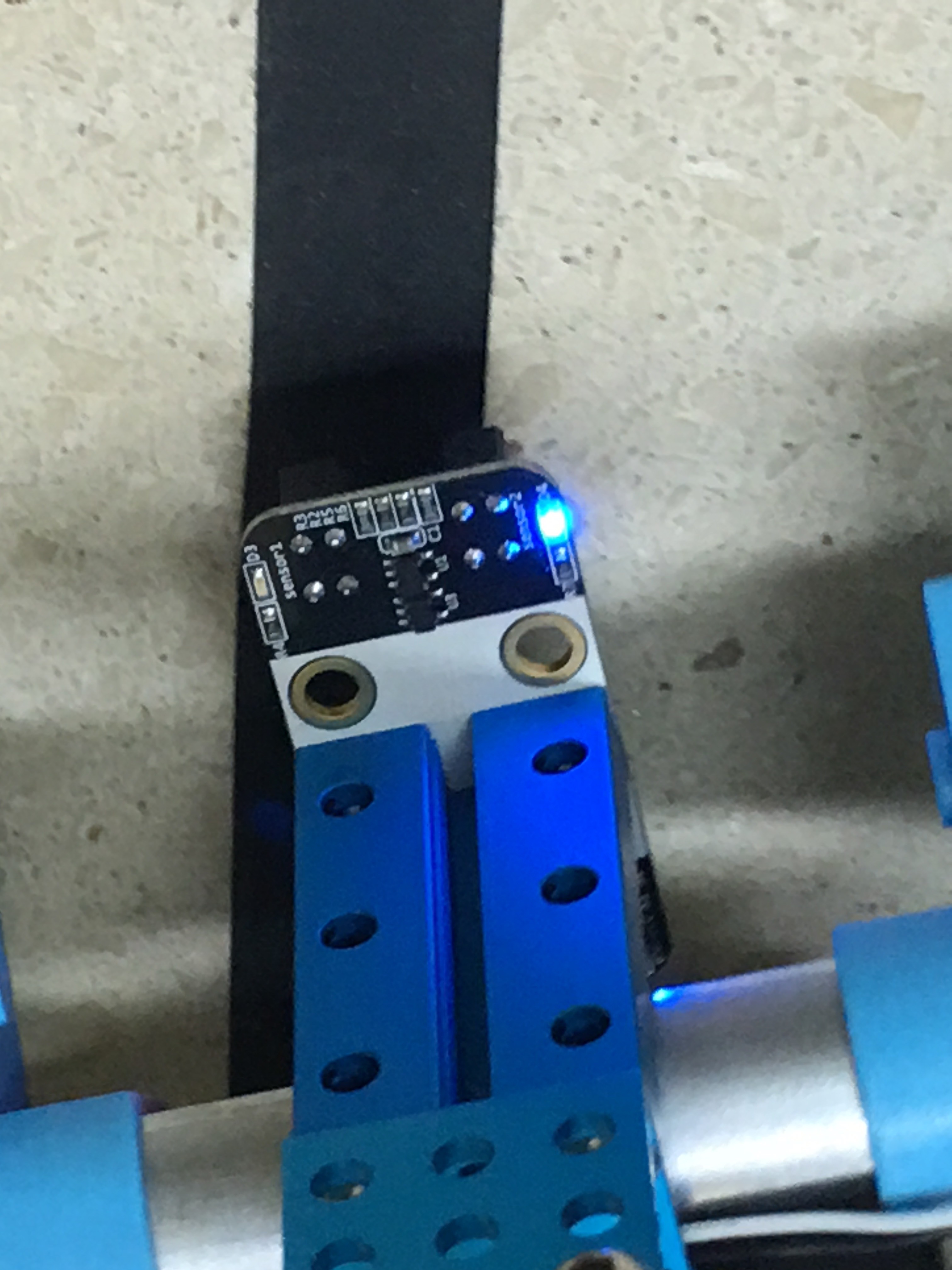
Nas imaxes anteriores vemos que dispón de dous sensores. Cada sensor ten un diodo LED emisor de infravermellos IR e un fotodiodo IR que detecta a luz infravermella.
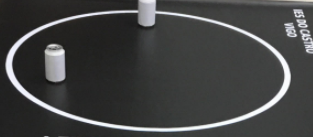
Como vemos na seguinte imaxe pola medida da cantidade de luz infravermella reflectida, é posible detectar as transicións entre liñas escuras e liñas claras, así como a luz reflectida directamente en fronte do sensor.
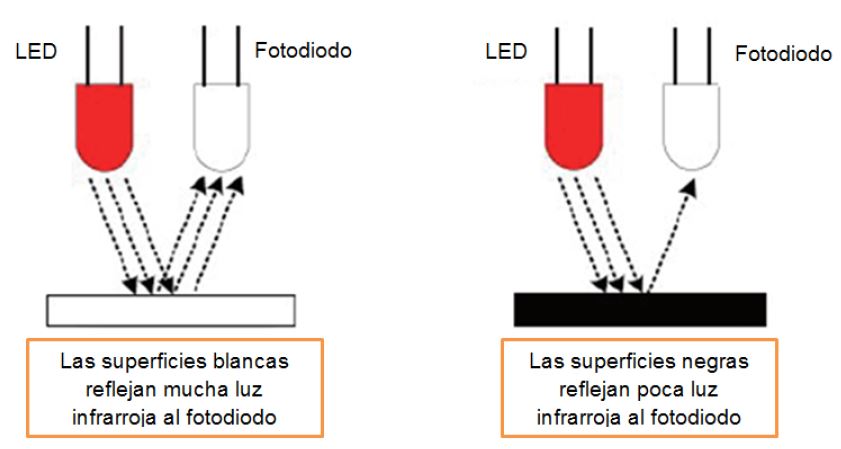
Funcionamiento del módulo detector de línea, Susana Oubiña Falcón en Divirtiéndome con mBot Ranger CC BY 4.0.
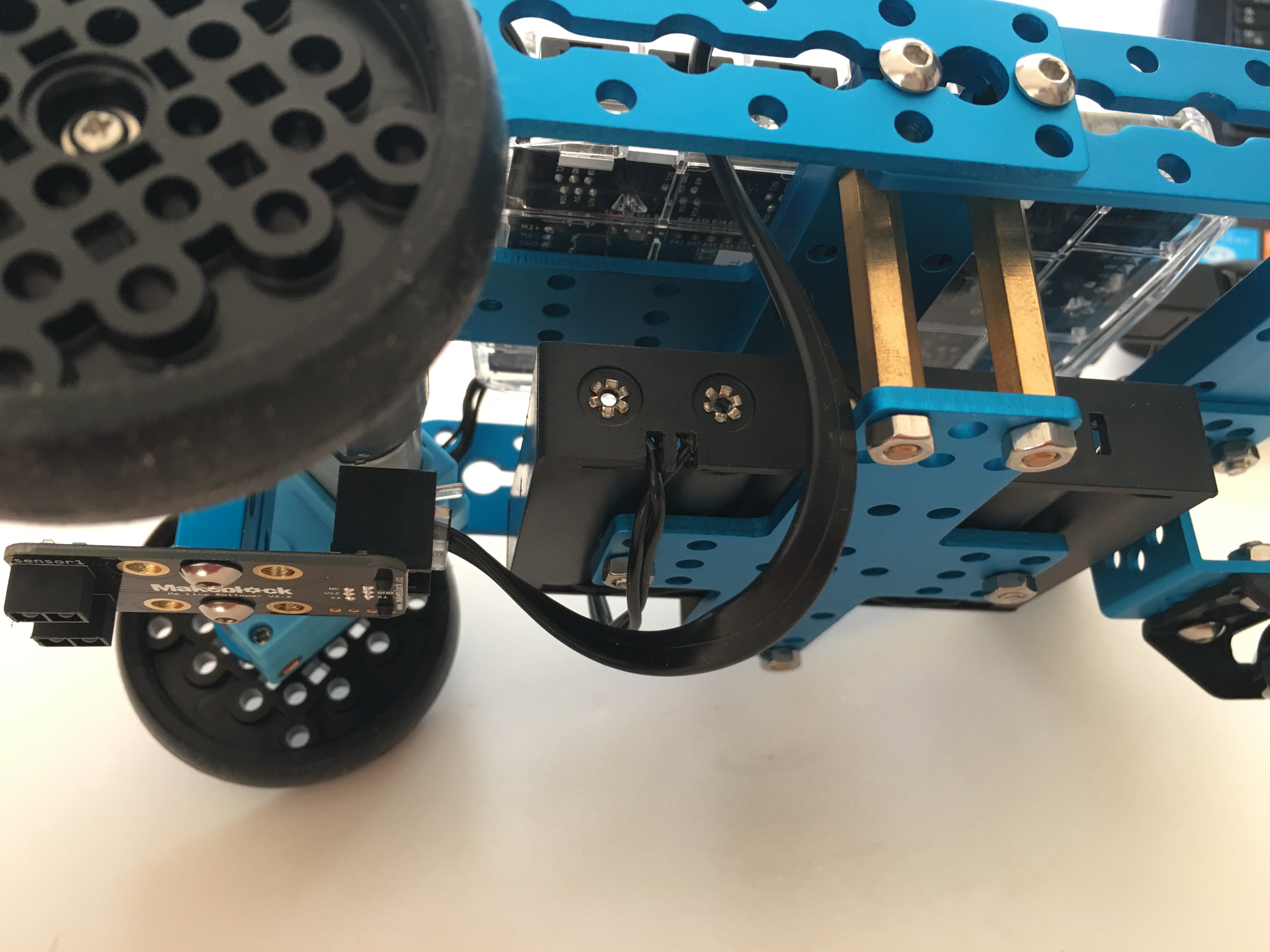
Conexión do sensor segueliñas á placa Me Auriga:
O sensor se conecta á placa Me Auriga a través dos portos que mostran etiqueta azul (6-10). Nas actividades seguintes está conectado ao porto 9.

![]()
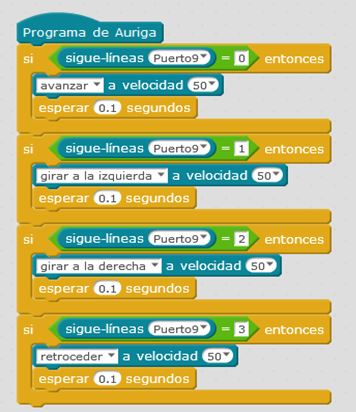
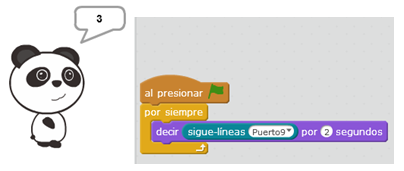
- Seguelíñas-1: Conectar o sensor ao porto 9 e copiar o seguinte código co robot conectado ao ordenador. Executar o programa e medir os valores que o Panda dá cando o robot está sobre unha superficie negra, sobre unha superficie branca, ou a metade en cada cor. Anotar o resultado debaixo de cada foto.

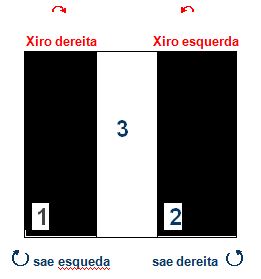
SOLUCIÓN:
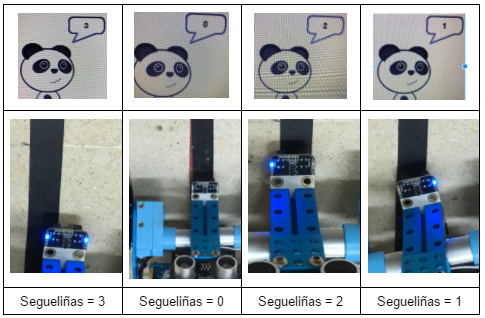
3: os dous sensores están fora da liña negra.
0: os dous sensores están dentro da liña negra.
2: o sensor 1 está fora da liña negra.
1: o sensor 2 está fora da liña negra.
- Seguelíñas-2: Programar o robot para que siga a liña negra. Fíxate no seguinte vídeo e estuda como o robot vai corrixindo a súa traxectoria.
Agora completa a seguinte actividade:
-
- Se o robot vai pola liña negra ten que simplemente avanzar
-
- Se o robot sae pola esquerda, debe virar lixeiramente á dereita
-
- Se o robot sae pola dereita debe virar lixeiramente á esquerda.
-
- Se o robot sae totalmente, que debe facer? (posiblemente esta elección marque a diferenza entre os robots).

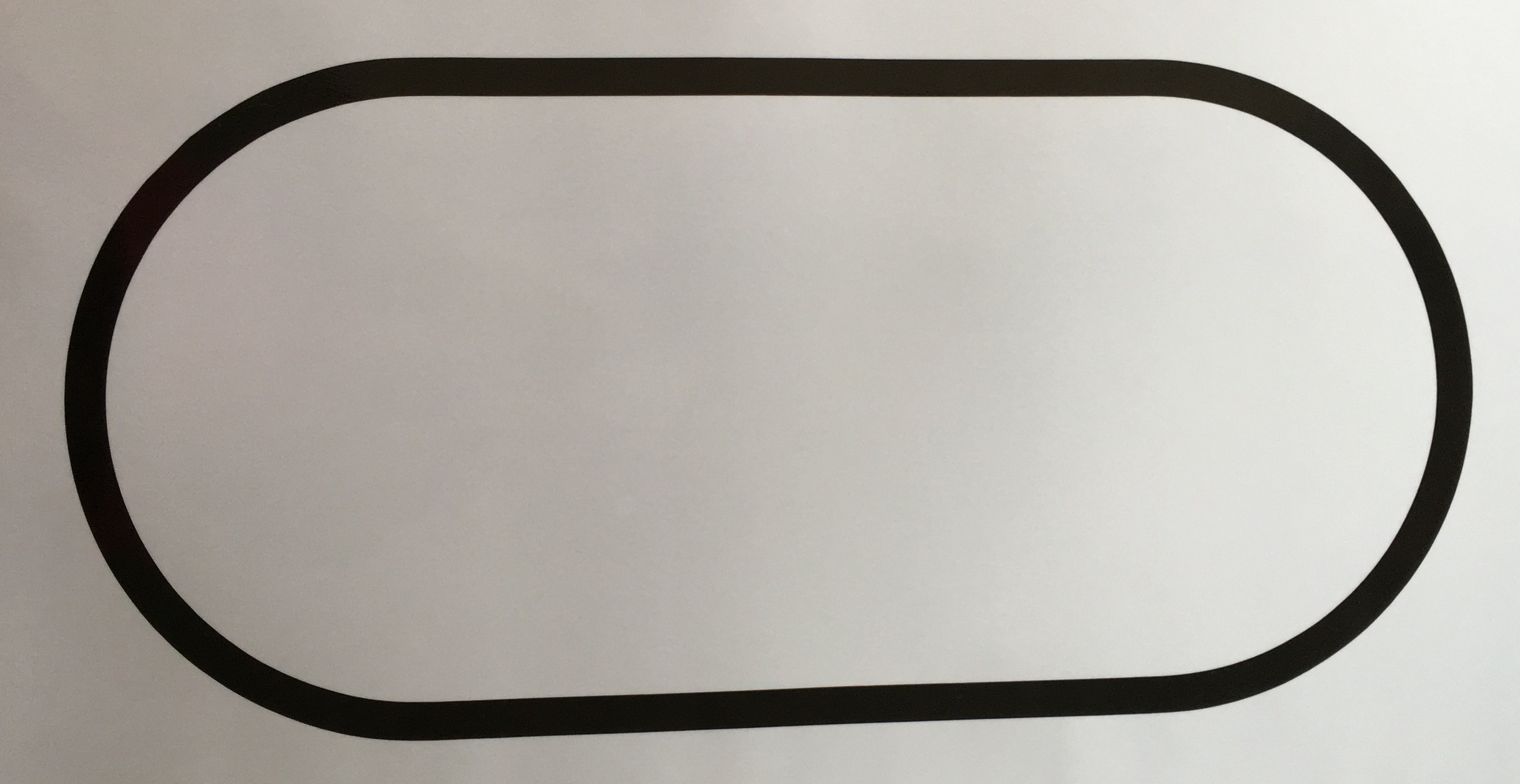
- Seguelíñas-3: Realizar un programa para o robot percorra a pista indicada no menor tempo posible.
SOLUCIÓN:

- Seguelíñas-4: Baseándose no programa anterior realizar os axustes necesarios para facer o recorrido no menor tempo posible, na seguinte pista, que ten cruzamentos e curvas.
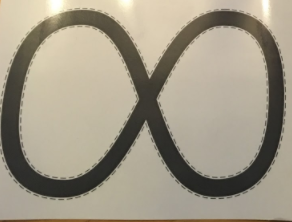
SOLUCIÓN: É a mesma que a actividade anterior coa única diferenza de que hai que axustar a velocidade para que non se saia o robot da liña negra nos cruzamentos e curvas.
- Seguelíñas-5: Programar o robot para que siga unha liña branca sobre unha pista negra. Para reforzar os coñecementos, pintar un curto tramo de pista e contestar as seguintes preguntas:
-
- Si vai sobre liña branca o marcador indica ……... Que facer? ………..
- Si sae pola esquerda o marcador indica …………. Que facer? …….....
- Si sae pola dereita o marcador indica …………….. Que facer? …….....
- Si pisa totalmente a liña negra o marcador indica .... Que facer? ……...
-
SOLUCIÓN:
- Seguelíñas-6: Realizar o programa para que o robot poda seguir a seguinte liña branca do circuíto.
SOLUCIÓN: