Sensor de luz
Conditions d'achèvement
![]()
Para que sirve?:
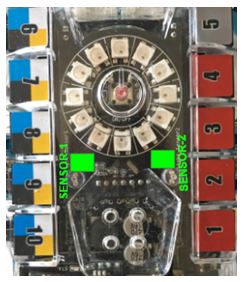
Os sensores de luz, son dous e poden actuar de forma independente. Miden a cantidade de luz que incide sobre eles. Con este sensor e en función da intensidade de luz, podo programar unha serie de ordes no robot mBot Ranger.
![]()
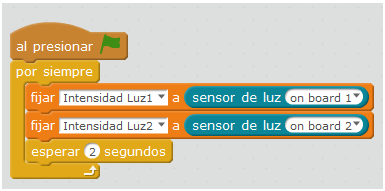
- Sensor de luz-1: Comprobar o funcionamento dos sensores de luz do robot. Para iso hai que crear unha variable que se chamará “intensidade de luz” e programar o robot para que o sensor1 e o sensor2 nos dean os valores correspondentes.
SOLUCIÓN:

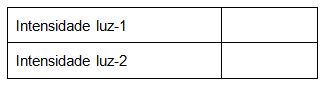
Escribir os valores obtidos na seguinte táboa:
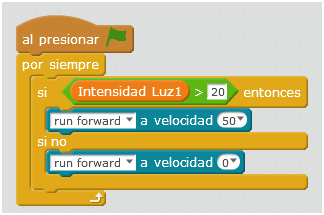
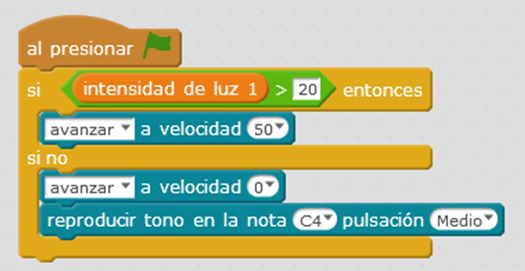
- Sensor de luz-2: Modificar o programa anterior, para conseguir que o robot se comporte como un “vehículo solar” de xeito que avance, a velocidade 50, cando a intensidade de luz sexa maior de 20, e que se deteña se o valor é inferior.
Programa base
SOLUCIÓN:
- Sensor de luz-3: Mellorar o robot solar, do exercicio anterior, de tal xeito que cando o robot reciba unha intensidade de luz de 20 ou menor, se pare e soe unha alarma.
SOLUCIÓN:
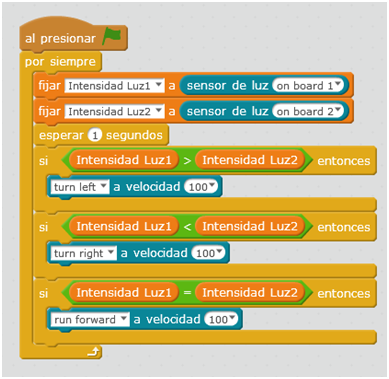
- Sensor de luz-4: Dirixir ao mBot Ranger cunha lanterna, que incide directamente sobre o sensor 1 e o sensor 2. O robot virará para o lado que reciba a luz.
SOLUCIÓN:
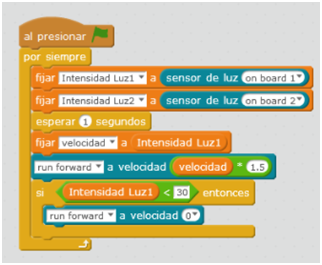
- Sensor de luz-5: Programar o mBot Ranger para que se mova en función da intensidade de luz. Canto maior sexa a intensidade de luz que recibe, maior será a velocidade.
SOLUCIÓN:
Modifié le: mardi 18 juillet 2017, 12:25