Traballamos con motores
![]()
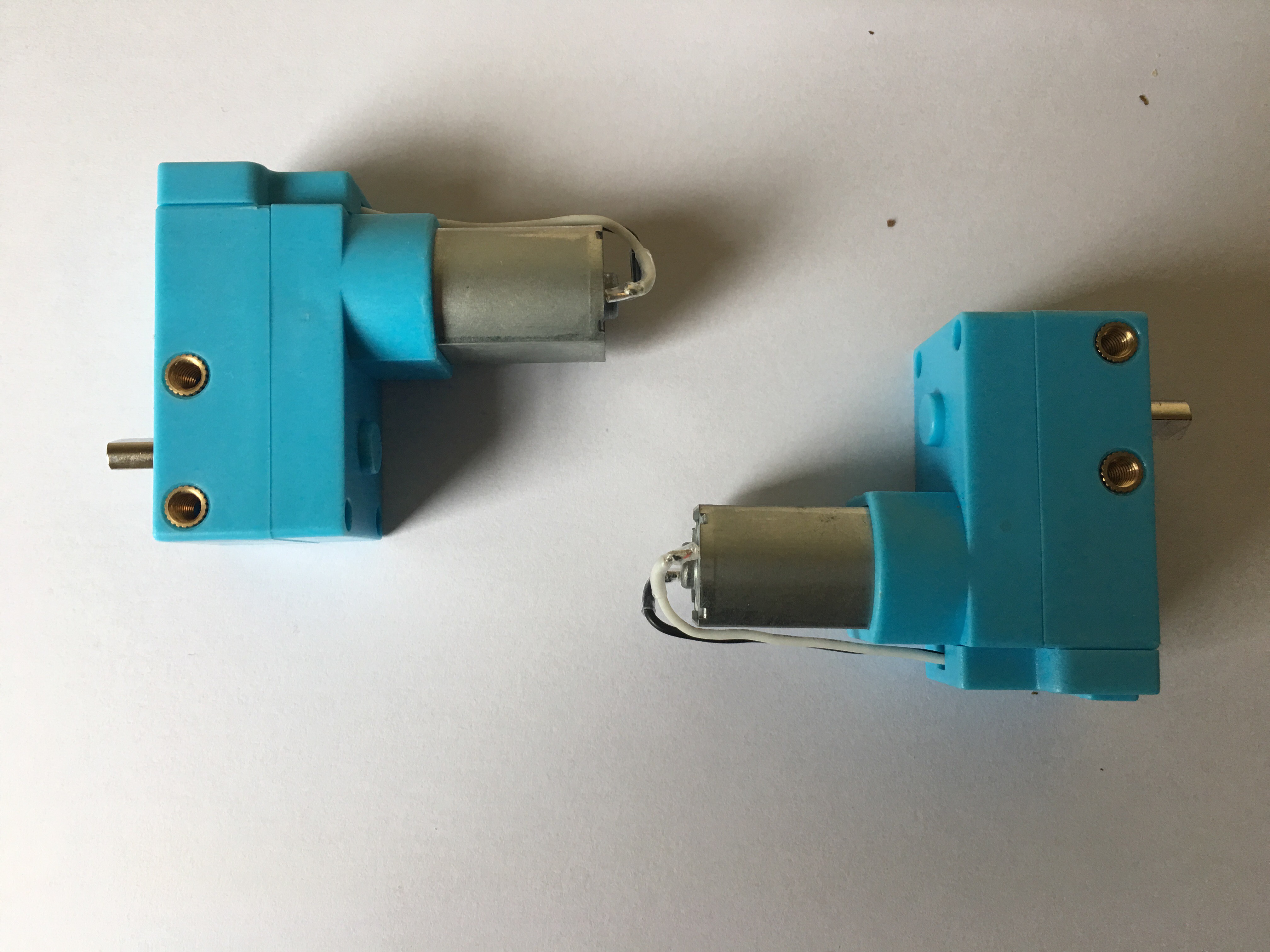
Os motores están situados na parte posterior da placa e aparecen nomeados como M1 e M2.

conexión motor motores
Estes motores son de corrente continua de 7,4 V e a 180 rpm.
mBot Ranger:
Estes motores cando se programan poden variar a súa velocidade, que está comprendida entre 0 e -255. O valor negativo indícanos unha rotación inversa.
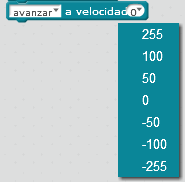
Ademáis da velocidade tamén se pode variar o sentido de xiro do motor.
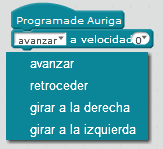
Pódese controlar a velocidade de cada motor, independentemente, marcando as revolucións de cada un dos motores. O signo indícanos si vai cara adiante ou cara atrás.

mBot:
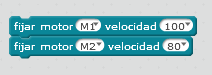
No mBot tamén se pode controlar, independentemente, a velocidade de cada un dos motores. No exemplo amosado a continuación, un motor vai a unha velocidade de 100 e o outro motor vai a 80.
Acéndese a través dun interruptor que ten na parte dereita.
![]()
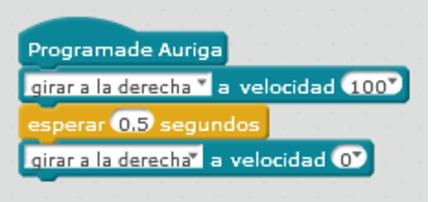
- Motor-1: Por o robot no chan, copiar o seguinte programa e probalo sen desconectar o cable:
SOLUCIÓN:
No seguinte vídeo podes ver o resultado final:
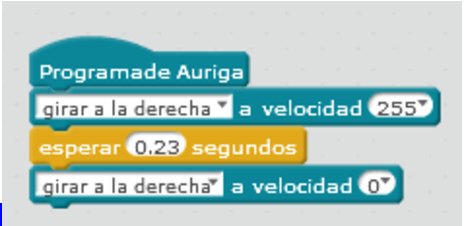
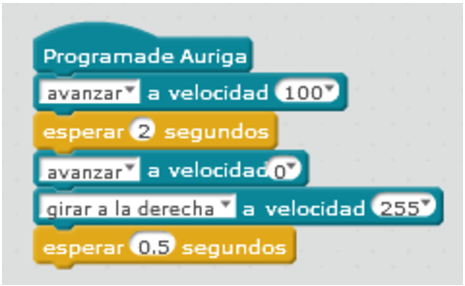
- Motor-2: Modificar o programa para que xire 90 graos, pero á máxima velocidade.
SOLUCIÓN:
- Motor-3: Deseñar un programa que faga avanzar o robot a distancia dun metro no chan.
SOLUCIÓN:
No seguinte vídeo podes ver o resultado final:
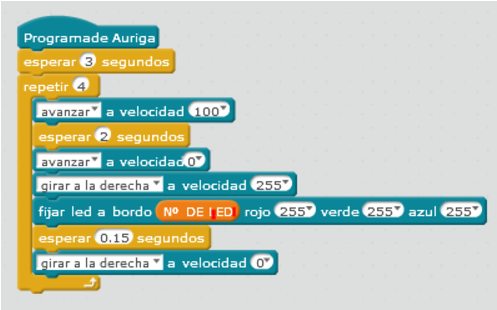
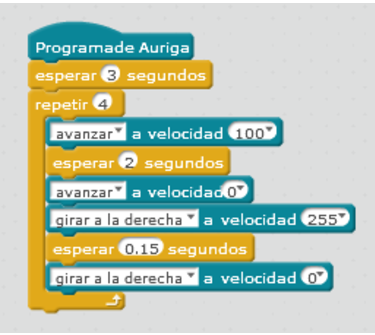
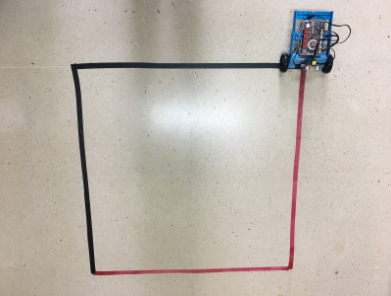
- Motor-4: Unindo os dous programas anteriores crear un programa que faga que o robot trace un cadrado, dun metro de lado, o máis rápido posible. Para probalo hai que subir ao robot o programa.
SOLUCIÓN:
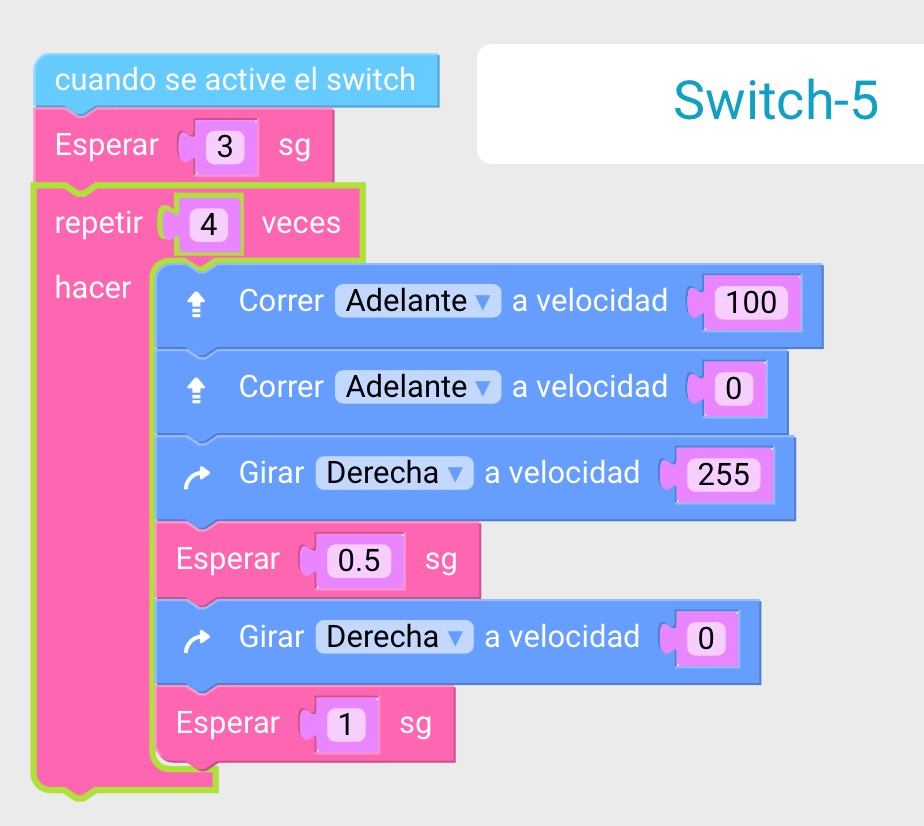
Se se programa coa app do móvil a solución é a seguinte:
- Motor-5: Modificar o programa para que cada vez que xire 90 graos se acenda un cuarto da matriz de LED’s
SOLUCIÓN: