Tarefa 2.- Obstáculos no camiño
|
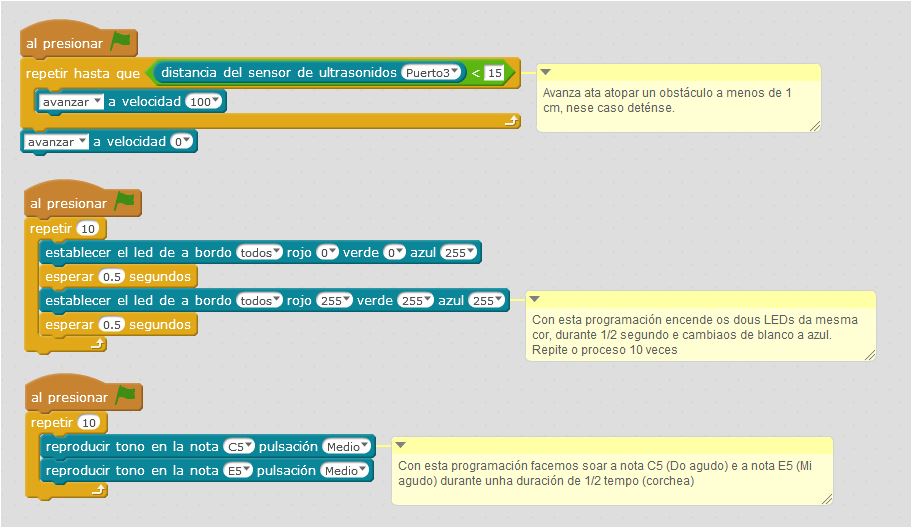
Con esta tarefa aprenderemos a manexar o sensor de ultrasons, que conectaremos ao porto 3. Este sensor emite un ultrason (imperceptible polo humano) semellante aos morcegos ou golfiños. Cando o ultrasón rebota nun obxecto, rebota e o ECO chega ao sensor, calcula o tempo que tardou e según a velocidade do son, é capaz de medir a distancia ata o obxecto ou obstáculo.
Empregaremos o bloque "CONDICIÓN" "repetir ata que..." E un bloque matemático "menor que..." Se queremos que o robot avance, ata que detecte un obstáculo a unha distancia menor que 15 cm.
|
|
|
Tarefa 2.1.- Se queremos dificultar un pouco máis a programación... o noso coche de policía patrulla e se atopa un obstáculo para.
|
|
|
Tarefa 2.2.- Cando o coche de policía atopa o obstáculo no camiño, debe retroceder (marcha atrás) Tarefa 2.3.- Cando o coche de policia atopa o obstáculo no camiño, e ten espazo para maniobrar, xira 180º e volta por onde veu. Tarefa 2.4.- Se atopa un obxeto lixeiro ( lata refresco) , empurra a lata cara á esquerda e continúa o seu camiño.
Tarefa 2.6.- Se o obxecto é moi pesado e hai espazo suficiente, non pode apartalo, entón esquívao e continúa o camiño. |
 Este sensor mide a distancia en cm.
Este sensor mide a distancia en cm.