Tarefa 6.- Intrusos no meu cuarto
|
O módulo PIR é un sensor pasivo que capta a luz infravermella do ambiente, e reacciona aos seus cambios. Serviranos para detectar o movemento. Isto é posible a ce crea e transmite un campo de luz infravermella que choca contra os obxectos do entorno, e detecta os cambios no “eco” que recibe. O ángulo de visión é de 90º e o radio de alcance está entre os 6 e os 9 metros. Proporciona unha saída dixital (0-1) ao estar conectado a placa. Este sensor emprégase para detectar persoas ou animais (movemento) nun rango de 6 m. Se algo se move, o sensor activa a saída dixital SIG en “alta” (1) Tarefa 6: Deseñar unha alarma para a nosa habitación. Para iso deseñamos un programa cun escenario e dous obxectos (un intruso e un botón). Cando o sensor PIR detecte movemento aparecerá o “panda ladrón” na escena e o botón do escenario e os LEDs do robot poranse en vermello, e soará unha alarma. Cando non hai intrusos, o botón e os leds do robot están en verde, non aparece o panda e non emite ningún son o robot.
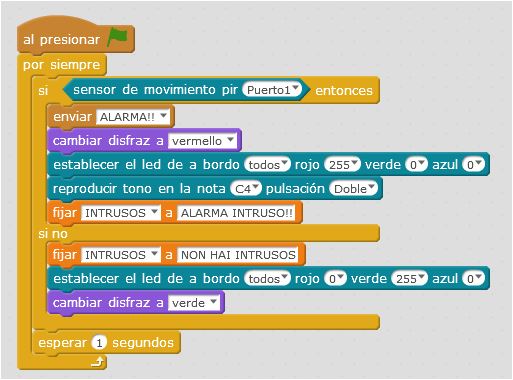
No escenario teremos 2 obxectos (Panda e botón vermello/verde). Tamén crearemos unha variable (INTRUSOS) Programaremos o botón que terá 2 disfraces (vermello e verde). Empregaremos o bloque CONDICIÓN "si..... entonces.... si no...." Se o sensor PIR detecte movemento, entón enviará unha mensaxe ao obxecto Panda, cambiará o disfraz a "botón vermello", tamén acenderá os leds de a bordo en vermello , emitirá un son de alarma,e por último cambiará a variable a "alarma intrusos" Se non... a variable quedará en "non hai intrusos", os LEDs de a bordo estarán verdes, e o botón quedará en cor verde. Todo isto dentro dun bucle "por siempre" para que esteña controlando continuamente os intrusos na habitación.
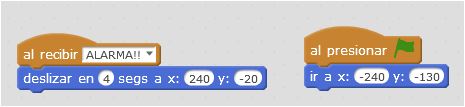
A programación do obxecto "PANDA" será a seguinte; Cando o Panda recibe a mensaxe "Alarma" deslízase pola habitación. E cando comeza o programa, sitúase na esquina inferior esquerda (coordenadas -240,-130)
|