Zum Kit Jr.
Section outline
-
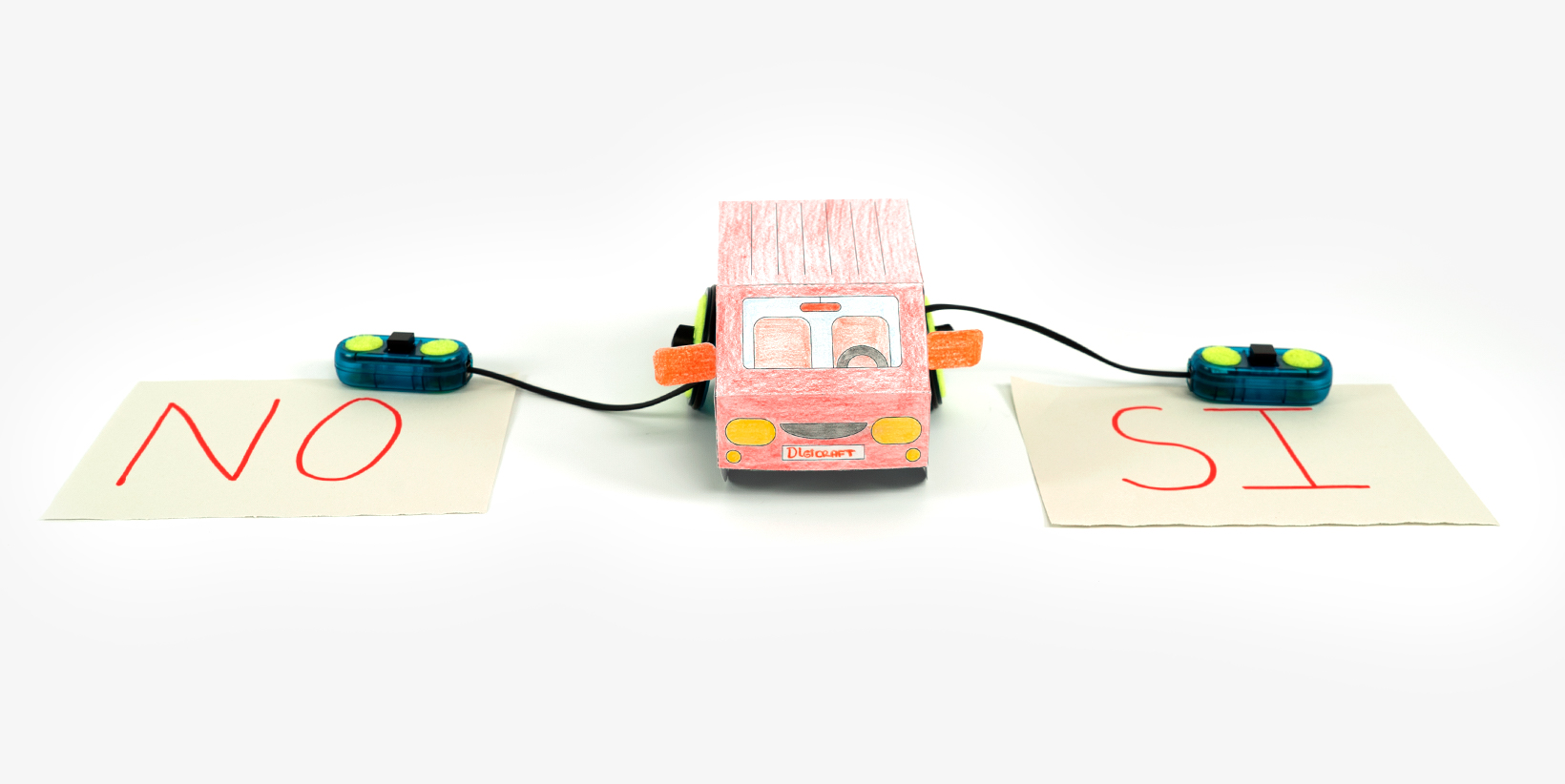
Nesta actividade o alumnado crea un coche que simula ser un coche intelixente, con condución autónoma que está aprendendo a coidar aos humanos. Ao final da actividade leemos preguntas sobre seguridade, os grupos deben ensinar aos coches a resposta correcta xirando o seu coche cara a carteis cun SÍ ou un NON.
Cómpre utilizar o seguinte material contido no kit:
- O cable micro-USB.
- Dos cables de conexión.
- Dous botons.
- Dos servos de rotación continua.
- A placa controladora.
- Dúas rodas.
- Dúas palometas.
- Un círculo dobre grande de cinta de peche por contacto.
- Un círculo dobre pequeno de cinta de peche por contacto.
Unir dous círculos grandes e rugosos de cinta de peche por contacto pola súa parte adhesiva, se non hai algún xa no kit. Isto forma o círculo dobre grande de cinta de peche por contacto.
Unir dous círculos pequenos e rugosos de cinta de peche por contacto pola súa parte adhesiva, se non hai algún xa no kit. Isto forma o círculo dobre pequeno de cinta de peche por contacto.
Desenvolvemento
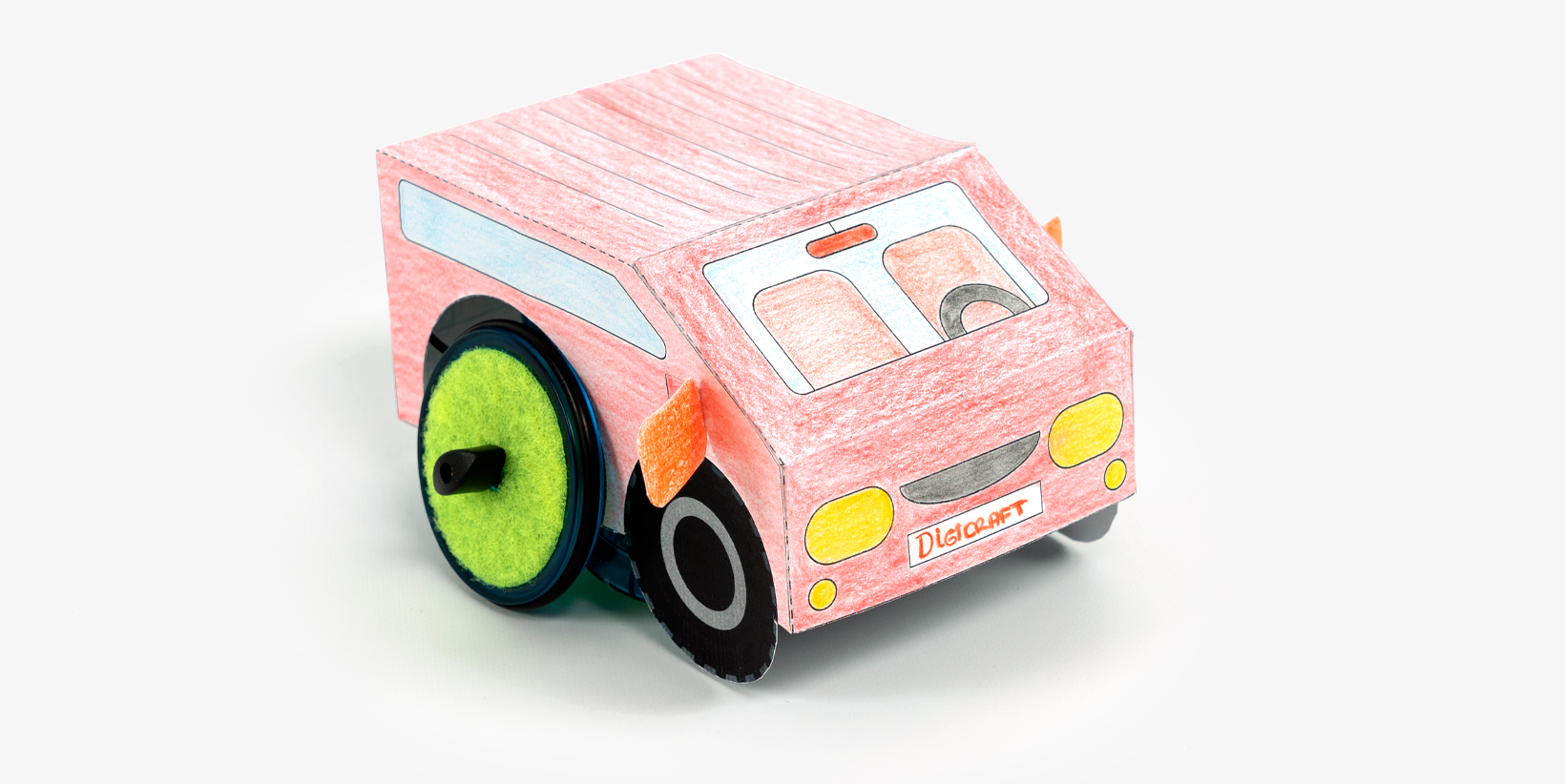
Creamos os grupos de traballo e repartimos un descargable co recortable do coche, unha folla de papel en branco, lapis de cores, tesoiras e pegamento a cada un. Indicamos que coreen, recorten e monten o recortable do coche. Ademais han de cortar a folla de papel en branco pola metade e escribir SÍ nunha mitade e NON na outra.
Unha vez rematados os coches recortables, repartimos un Zum Kit Junior a cada grupo e pedimos que saquen o material mencionado anteriormente.
Explicamos ao noso alumnado en que consiste o servo de rotación continua e o pulsador.
Un pulsador é un sensor moi sinxelo que permite detectar cando o presionamos e cando deixamos de facelo.
En Bitbloq Robotics Jr podemos realizar accións cando ocorre unha destas dúas cousas. Para iso, pulsamos sobre o botón esquerdo se queremos que detecte cando presionamos ou o dereito se queremos que detecte cándo deixamos de presionar.
Un servo de rotación continua é un actuador que xera un movemento rotatorio, ao que se lle poden incorporar accesorios como unhas aspas de ventilador ou unhas rodas. Podemos controlar o sentido de xiro e a velocidade do servo de rotación continua desde Bitbloq Robotics Jr. Para iso:
- O grupo de botons da esquerda permiten cambiar o sentido de xiro e paralo.
- O grupo de botons da dereita permite cambiar a velocidade de xiro.
Se ao conectar o servo de rotación continua á placa de control este xira de forma descontrolada hai que calibralo. Para iso introducir un desparafusadoor pequeno polo burato dispoñible no servo e xirar despacio, a un lado ou a outro, ata que o servo pare.
IMOS CONSTRUIR O COCHE:
- Adherir ambos servos usando un círculo doble pequeño de cinta de cierre por contacto.
- Adherir o círculo dobre grande de cinta de peche por contacto á base da placa controladora.
- Colocar ambos os servos sobre a placa controladora asegurándose de que os dous eixes metálicos están aliñados.
- Colocar una rueda en cada servo, introduciéndola en el eje y fijándolas usando las palometas negras


Colocar o coche de tal forma que o conector micro-USB quede mirando ao ordenador.
- Adherir ámbolos dous servos usando un círculo dobre pequeno de cinta de cerre por contacto.
- Adherir o círculo dobre grande de cinta de peche por contacto á base da placa controladora.
- Colocar ambos os servos sobre a placa controladora asegurándose de que os dous eixes metálicos están aliñados.
Para rematar a montaxe, indicamos ao alumnado que coloque o recortable sobre a placa controladora, coa parte dianteira apuntando ao cable.
BITBLOQ JR.
Recordamos que a interface ten varias pestañas:
- Hardware: na que se conectan os compoñentes do kit de forma virtual á placa controladora.
- Software: na que se constrúe a programación dos compoñentes.
- Información do documento: na que se pode cambiar o título do proxecto, engadir unha descrición ou cargar unha imaxe.

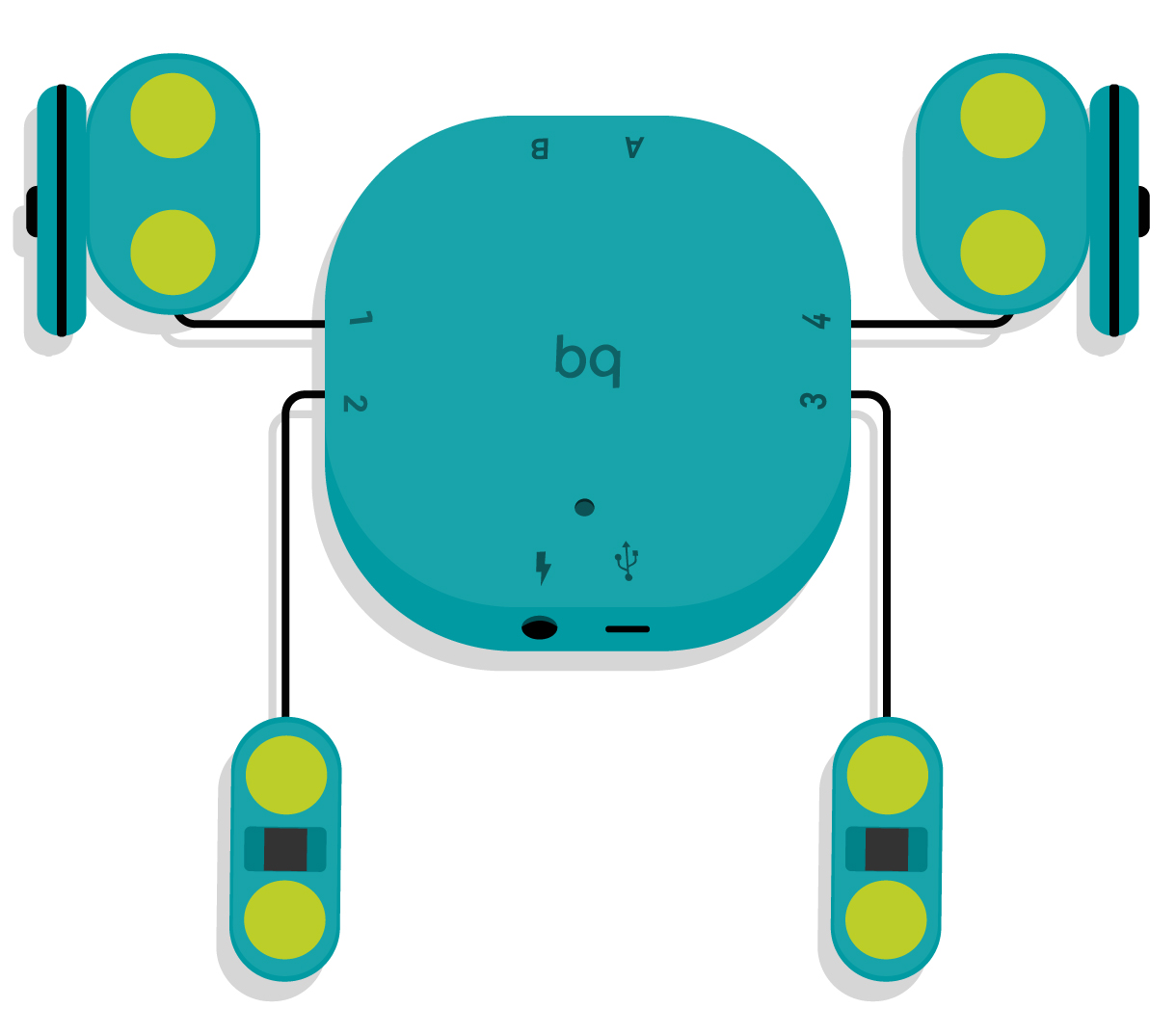
Pedimos que accedan á pestaña Hardware e que verifiquen que conectaron correctamente os compoñentes na súa placa fixándose no esquema.
Imos programar o noso coche!
Indicamos que volvan á pestaña Software para comezar a programar.
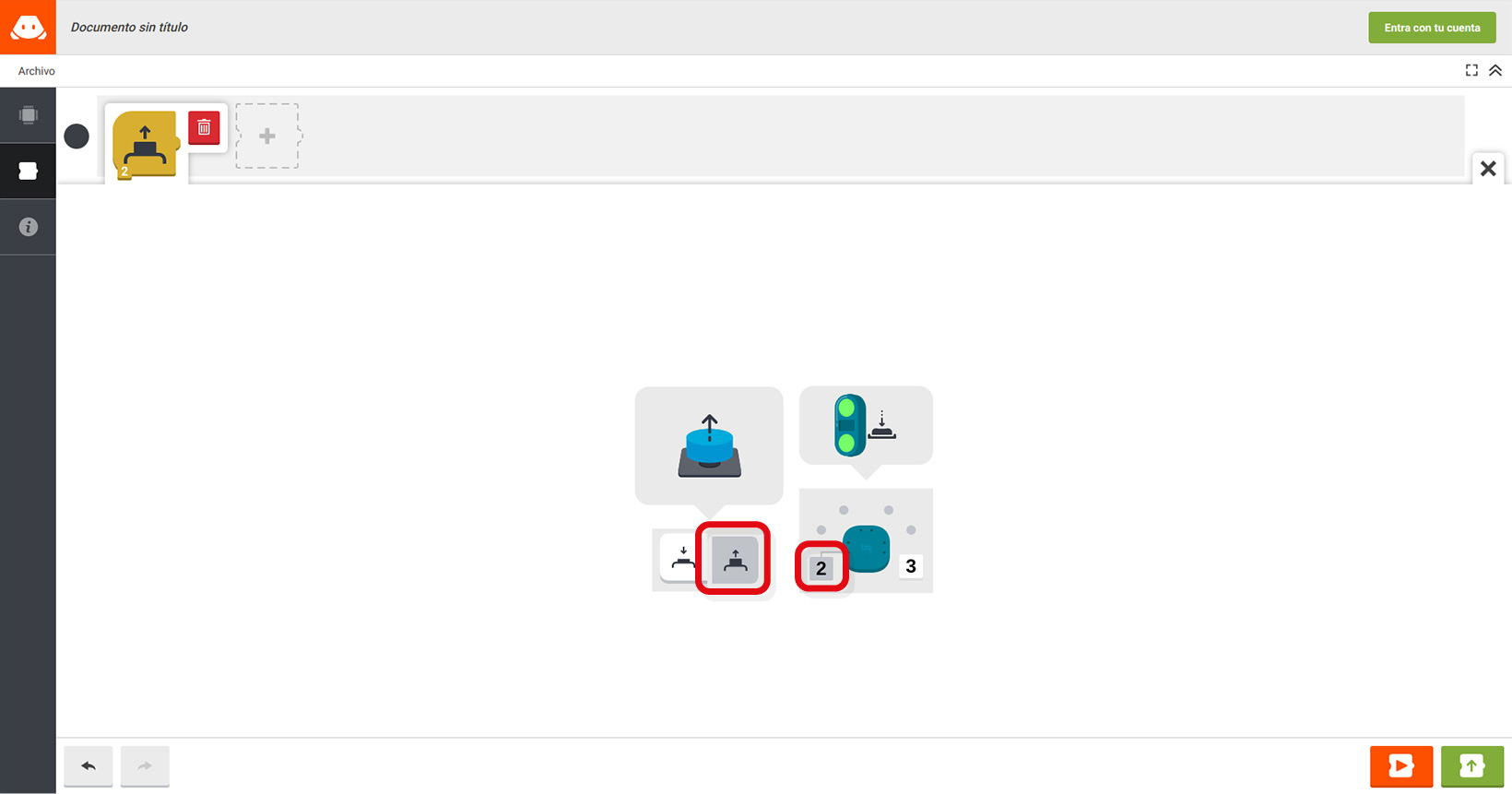
- A roda dereita débese moverse ao presionar o botón dereito e parar cando non se presiona. Para programar este movemento:
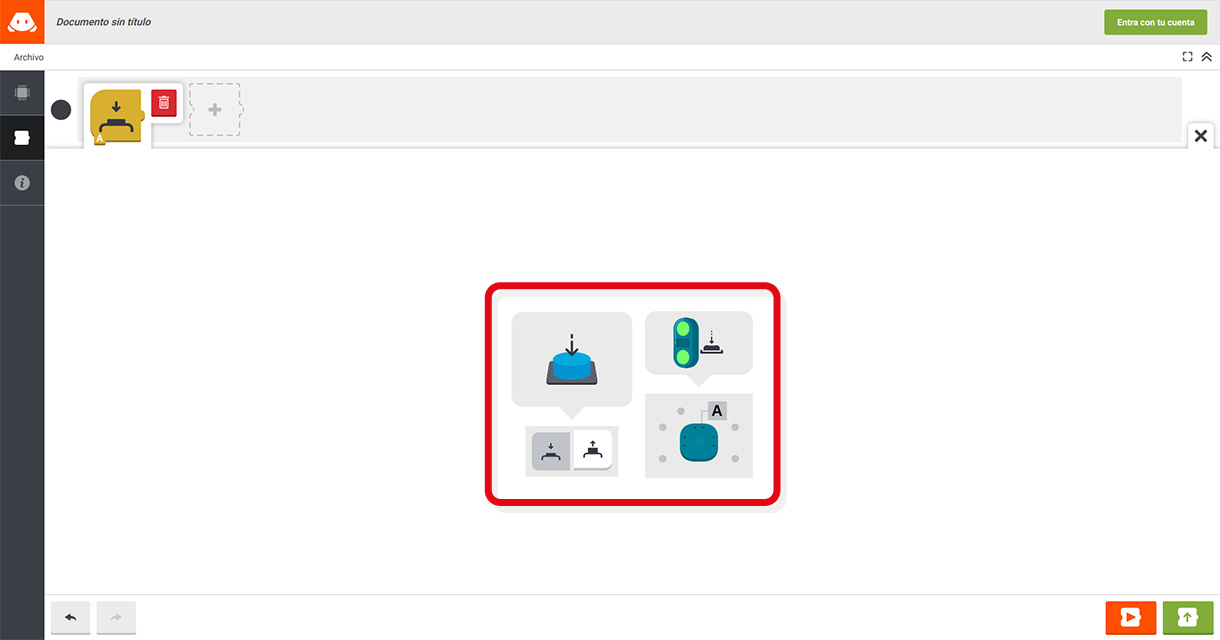
- Pulsar no símbolo + para engadir un evento.
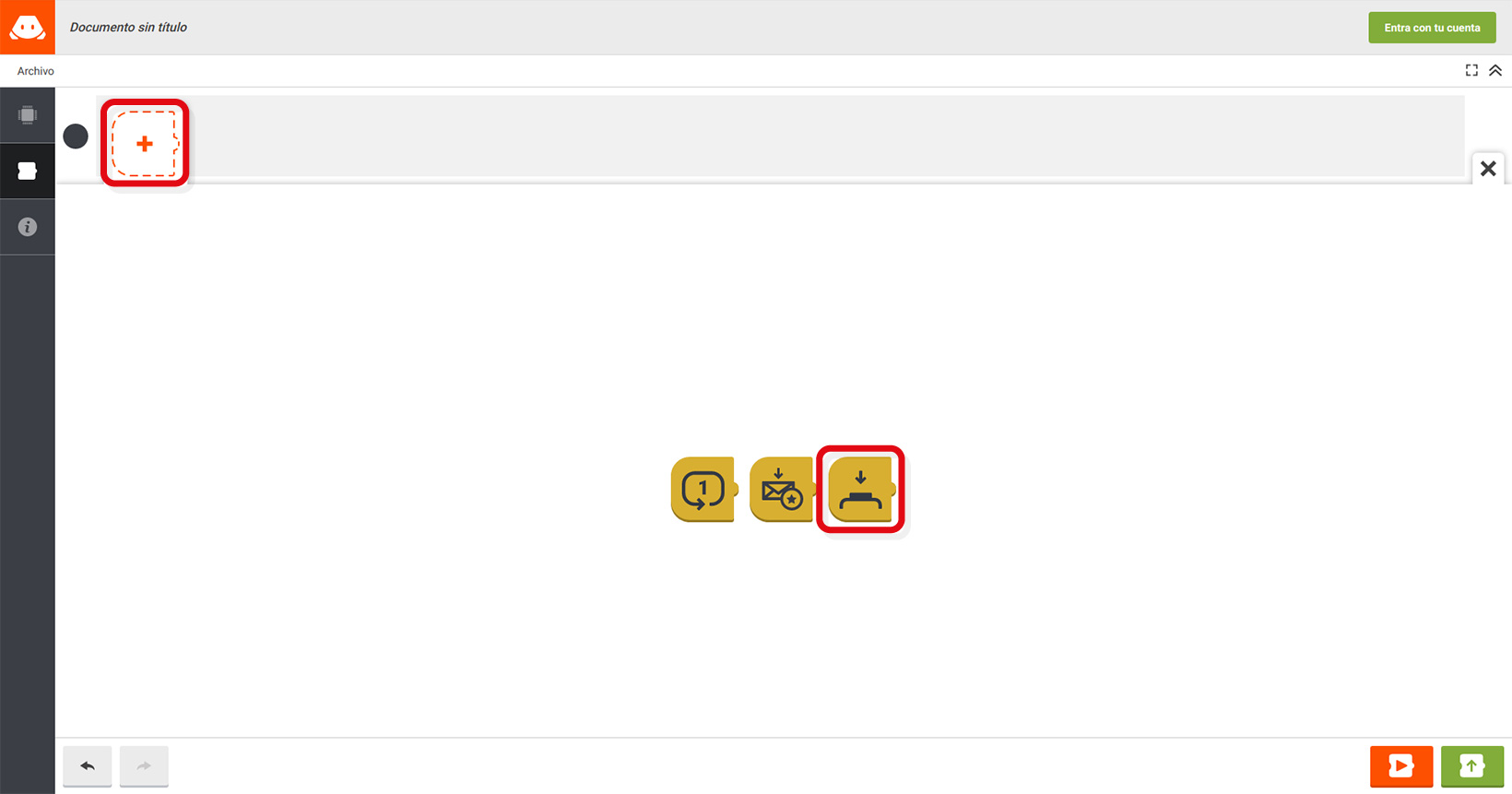
Seleccionar o evento do pulsador.
3. Seleccionar a opción ao presionar o pulsador.
4. Seleccionar o número 2 no esquema da dereita para controlar o pulsador conectado no 2.
O esquema aparece debido a que existen dous botons. Un de eles, o dereito, atópase conectado no número 2. O outro, o esquerdo, atópase conectado no 3.
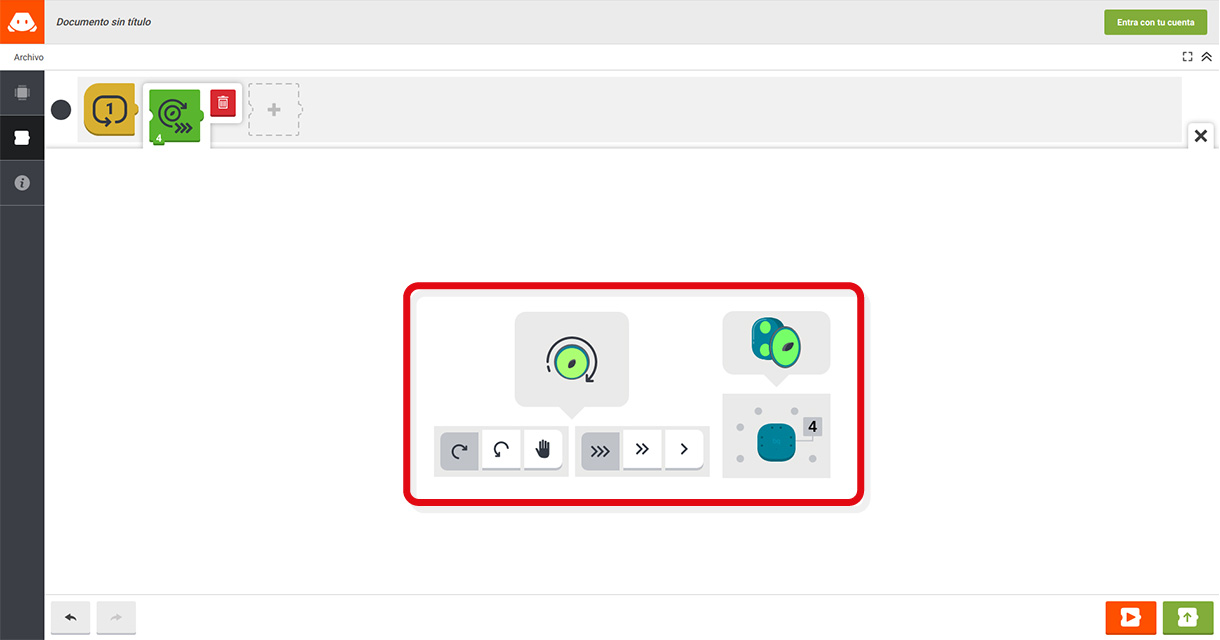
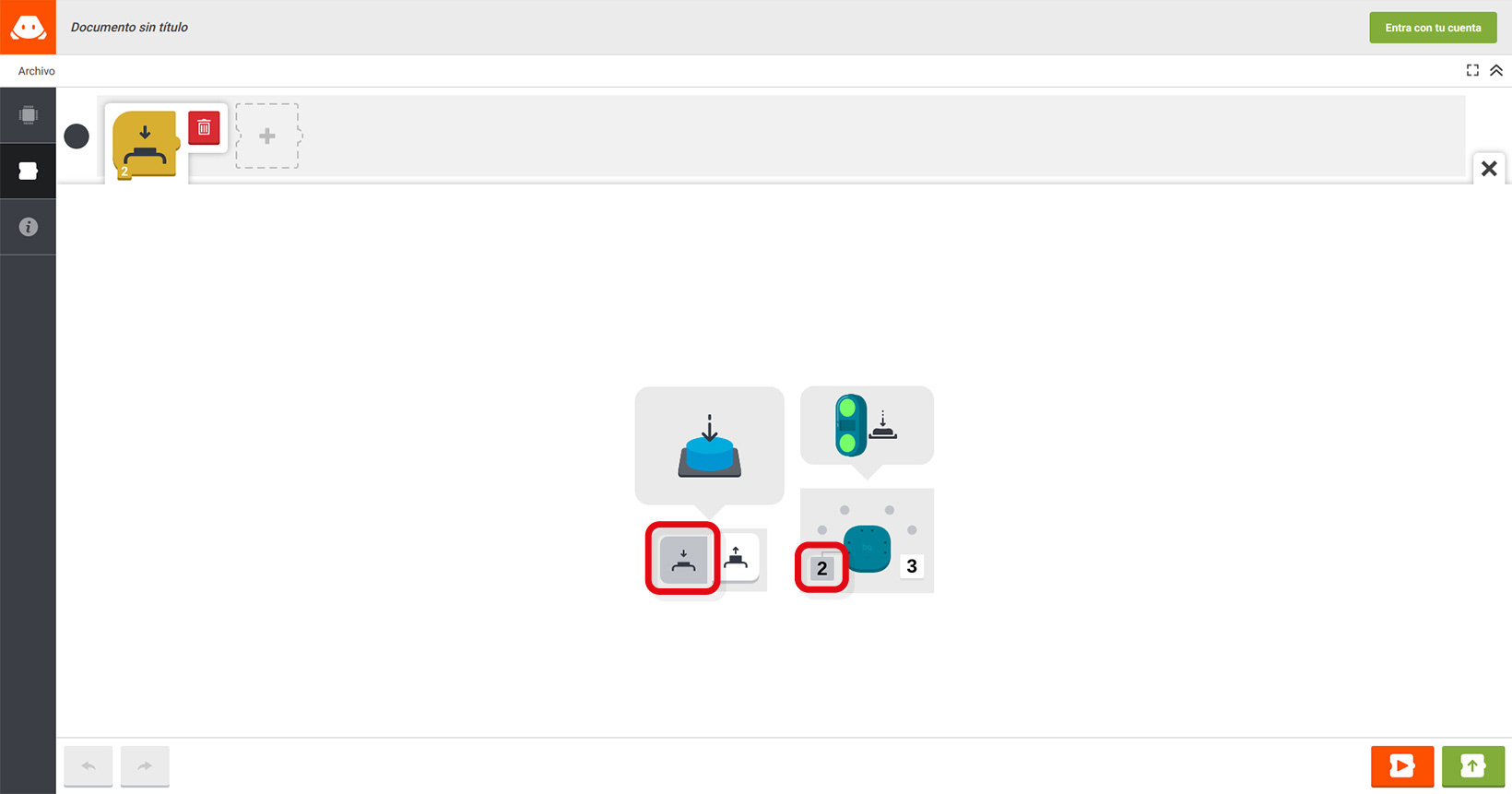
5. Premer no símbolo + para engadir un novo bloque.
6. Selecionar o bloque da icona da roda, correspondente al servo de rotación continua.

7. Seleccionar a opción xiro en sentido horario.
8. Selecciona-la opción cunha soa frecha para configurar que o servo de rotación continua xire despacio.
9. Seleccionar o número 1 no esquema da dereita para controlar o servo conectado no 1

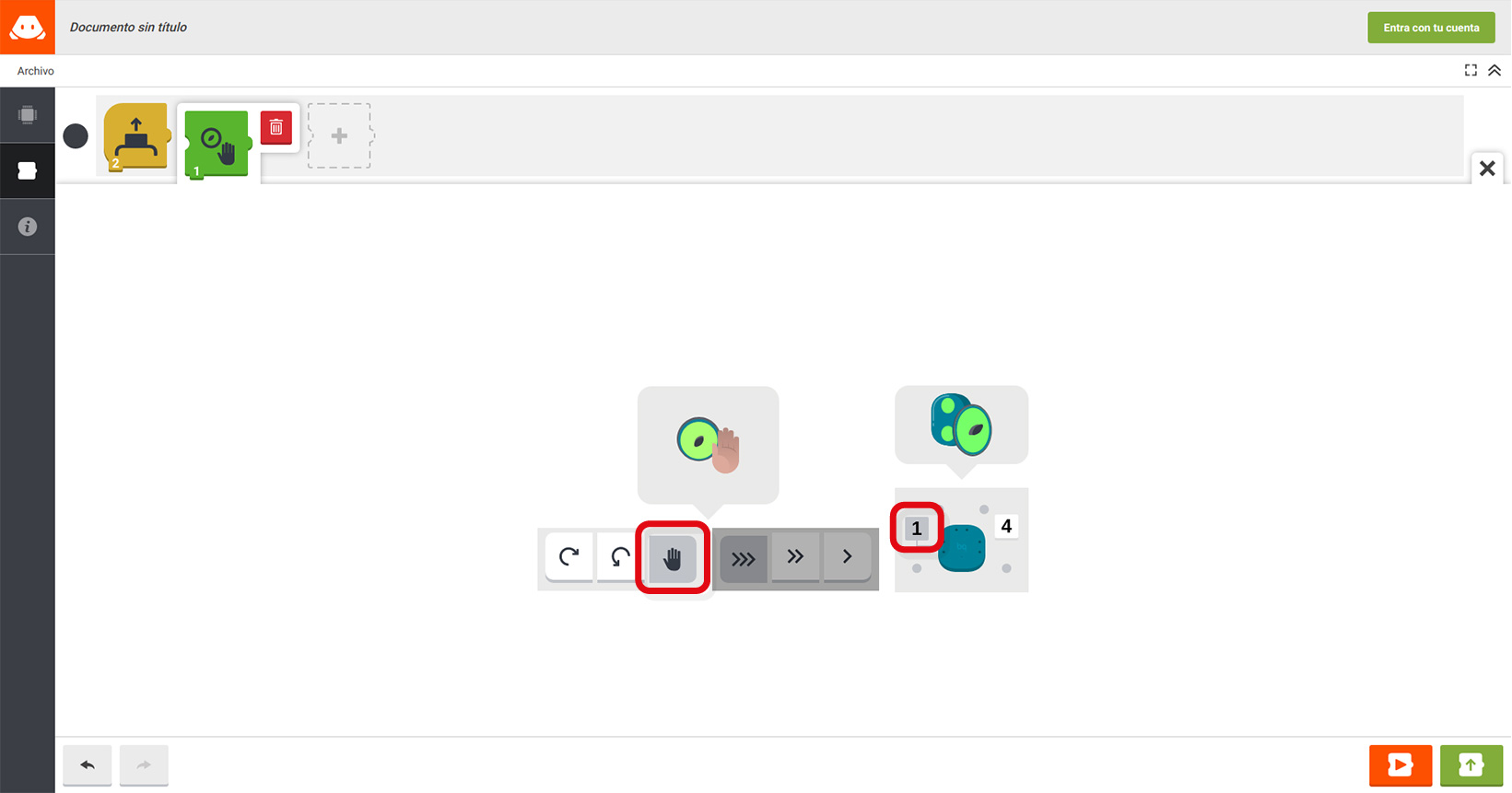
A roda dereita debe parar se non está presionado o botón dereito. Para programar isto:
- Pulsar no símbolo + para engadir un novo evento nunha nova liña de código.
- Seleccionar o evento do pulsador.
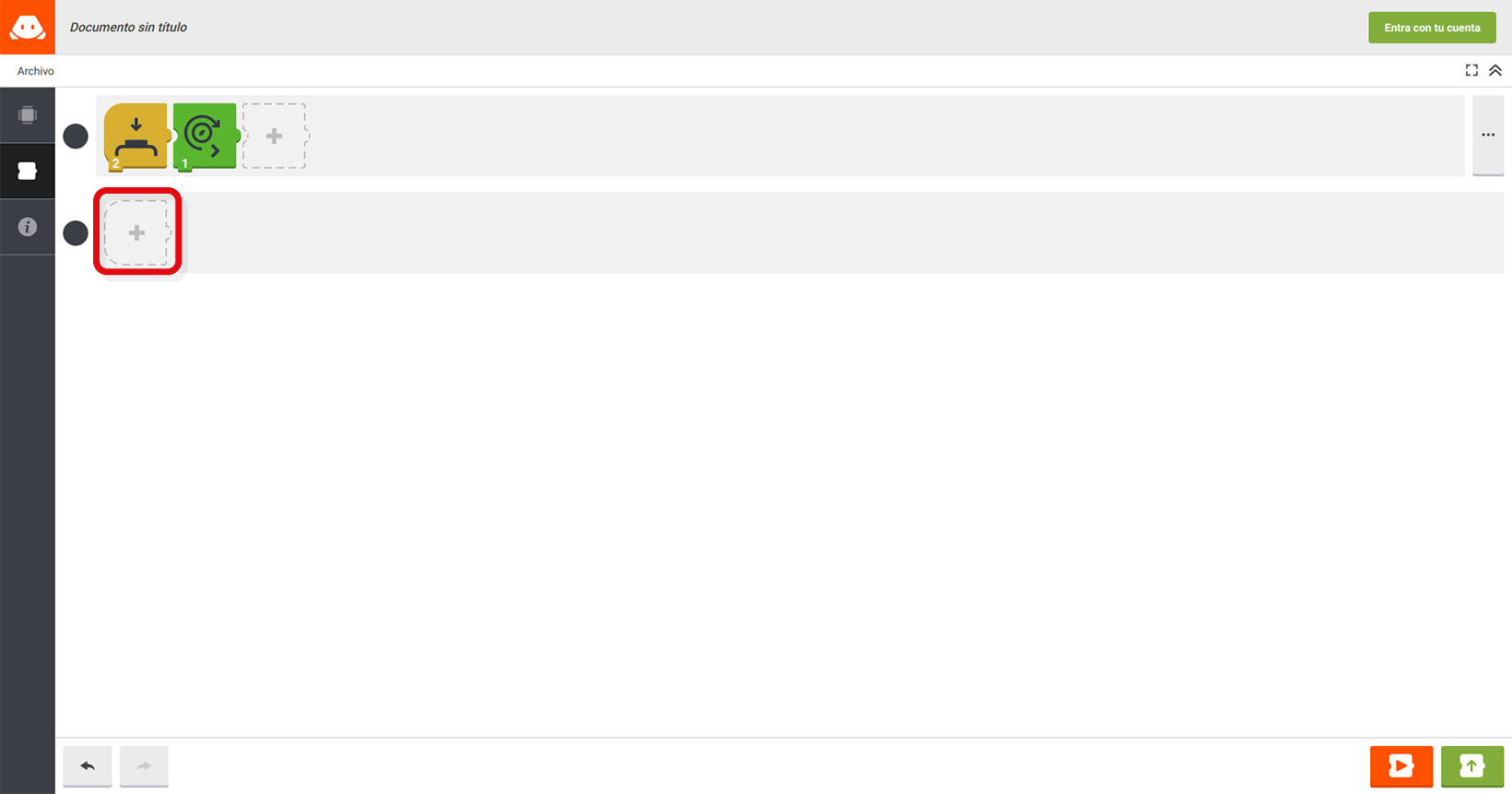
3. Seleccionar a opción ao deixar de presionar o pulsador.
4. Selecciona-lo número 2 do esquema da dereita.
5. Pulsar no símbolo + para engadir un novo bloque.
6. Selecciona-lo bloque correspondente ó servo de rotación continua.

7. Seleccionar a opción cuxo icono é unha man para deter o servo de rotación continua.
8. Seleccionar o número 1 no esquema da dereita para controlar o servo conectado no 1
Con estes pasos xa programaron a roda dereita. A continuación teñen que programar a roda esquerda seguindo os mesmos pasos pero cambiando o sentido de xiro e o número de conector do botón e do servo de rotación continua correspondentes.
- O servo de rotación continua debe xirar en sentido antihorario.
- O botón esquerdo atópase conectado no 3.
- O servo de rotación continua atópase conectado no 4.
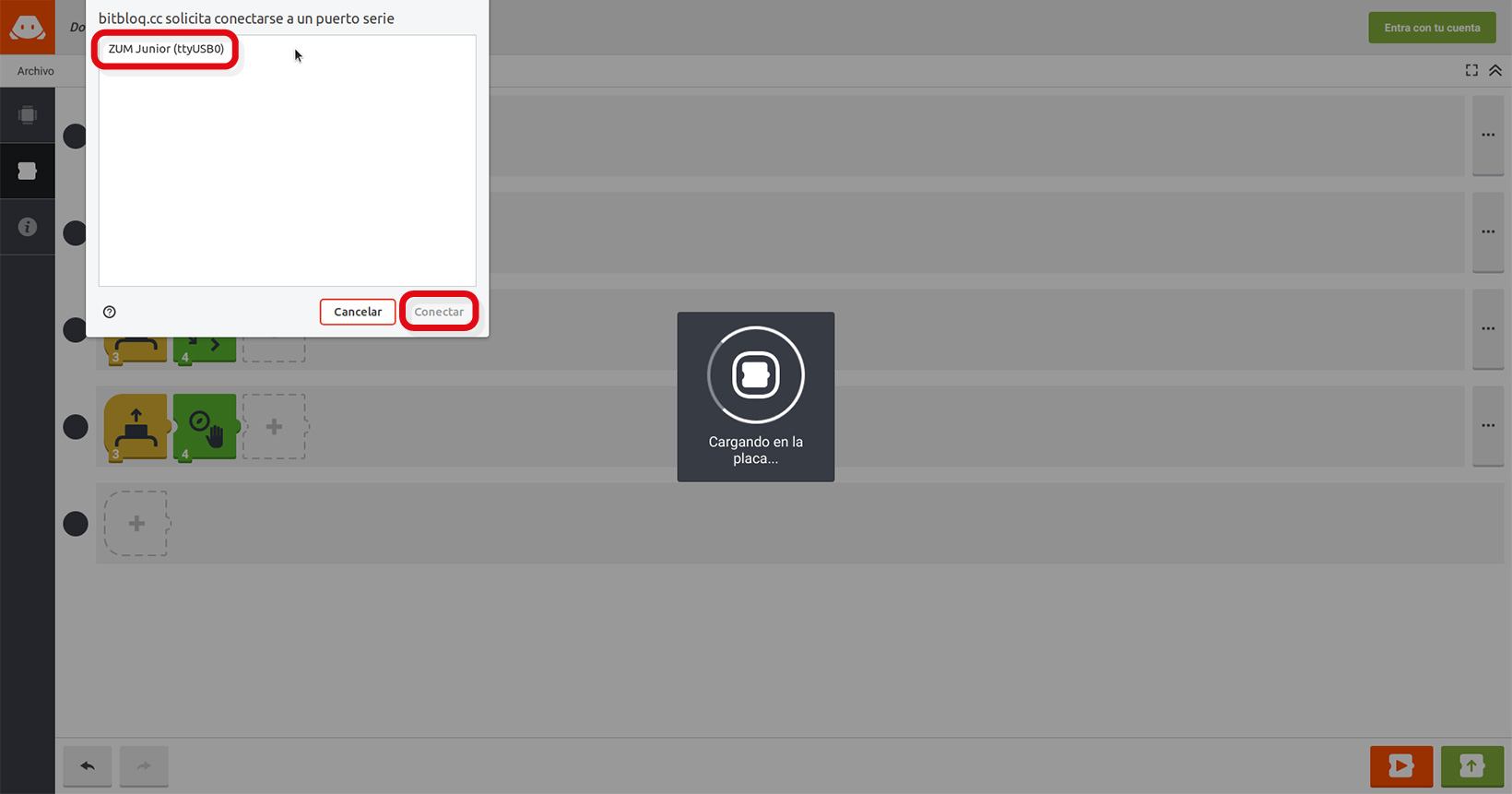
Para cargar o programa na placa controladora:
- Conectar a placa ao ordenador usando o cable micro-USB.
- Presionar o botón Cargar na placa.

3. Selecionar a placa ZUM Junior da lista.
4. Premer o botón Conectar.
Xa está todo terminado! Indicamos que coloquen os seus coches sobre a mesa co cartel de SI a un lado e o de NON ao outro. Lles propoñemos que proben os seus coches:
- Cando pulsen o botón esquerdo, o coche debería moverse cara á dereita.
- Cando pulsen o botón dereito, o coche debería moverse cara á esquerda.
Xogo
Explicamos que para que o noso coche sexa intelixente e poida axudar aos seus usuarios e usuarias, necesitamos ensinarlle que facer ante distintas situacións. Para iso, imos lanzar unha serie de preguntas que deben debatir en cada grupo.
Unha vez alcanzado un consenso, cada grupo debe controlar o seu coche para sinalar a resposta correcta. Desta forma, o coche pode memorizar a resposta.
Ao amosarlle distintos exemplos, a intelixencia artificial do coche aprende cal é a resposta correcta para cada un deles.
En xeral, as intelixencias artificiais que recoñecen situacións o fan usando aprendizaxe automática, un tipo de intelixencia artificial que utiliza exemplos para entende-lo mundo real. Por exemplo, podemos entrenar a unha intelixencia artificial para que recoñeza debuxos de pelotas se ao principio lle mostramos debuxos de varias delas e indicamos que son pelotas.
Co paso do tempo a intelixencia artificial aprenderá a identificar todo tipo de pelotas.
